Texto universitario
_____________________________
Módulo 0. Vectores y operaciones vectoriales
0.1 Algebra línea
Introducción a los diversos objetos (vectores, matrices y transformaciones lineales) que son el foco central del álgebra lineal. Qué podemos hacer con estos objetos, por ahora simplemente nos enfocamos en comprender sus propiedades básicas, cómo interactúan entre sí y su intuición geométrica.
En cursos de matemáticas más básicos, el enfoque estaba en cómo manipular expresiones que involucraban una sola variable. Por ejemplo, aprendimos cómo resolver ecuaciones como 4x − 3 = 7 y aprendimos sobre las propiedades de funciones como f (x) = 3x + 8, donde en cada caso la única variable se llamaba “x”. Una forma de ver el álgebra lineal es la extensión natural de estas ideas a la situación en la que tenemos dos o más variables. Por ejemplo, podríamos intentar resolver una ecuación como 3x + 2y = 1, o podríamos querer investigar las propiedades de una función que toma dos variables independientes y genera dos variables dependientes.
Para facilitar el manejo de expresiones que involucran varias variables, usamos vectores, que son listas ordenadas de números o variables. Decimos que el número de entradas en el vector es su dimensión, y si un vector tiene n entradas, decimos que “es un elemento de Rn. Denotamos los vectores en sí mismos con letras minúsculas en negrita como v y w, y escribimos sus entradas entre paréntesis. Por ejemplo, v = (2,3) R2 es un vector bidimensional y w = (1,3,2) R3 es un vector tridimensional en los reales.
En los casos bidimensionales y tridimensionales, podemos visualizar los vectores como flechas que indican el desplazamiento en diferentes direcciones por la cantidad especificada en sus entradas. La primera entrada del vector representa el desplazamiento en la dirección x, su segunda entrada representa el desplazamiento en la dirección y y, en el caso tridimensional, su tercera entrada representa el desplazamiento en la dirección z, como
 17.31.59.png)
El frente de un vector, donde se encuentra la punta de la flecha, se llama cabeza y el extremo opuesto se llama cola. Una forma de calcular las entradas de un vector es restar las coordenadas de su cola de las coordenadas correspondientes de su cabeza. Por ejemplo, el vector que va desde el punto (−1, 1) hasta el punto (2, 2 ) es
(2, 2) - (- 1, 1) = (3, 1).
Sin embargo, también es el mismo que el vector que apunta de
(1, 0) a (4, 1), ya que (4, 1) - (1, 0) = (3, 1) también.
Por tanto, es importante tener en cuenta que las coordenadas de un vector especifican su longitud y dirección, pero no su ubicación en el espacio; podemos mover vectores en el espacio sin cambiar realmente el vector en sí, como:
 17.40.18.png)
Para eliminar esta ambigüedad cuando hablamos de vectores, a menudo elegimos mostrarlos con su cola ubicada en el origen; esto se llama la posición estándar de un vector o está en posición estándar, las coordenadas del punto en su cabeza son exactamente las mismas como las entradas del vector.
0.2 Suma de vectores
Aunque podemos representar vectores en 2 y 3 dimensiones mediante flechas, enfatizamos que uno de nuestros objetivos es mantener los vectores (y todas nuestras herramientas de álgebra lineal) tan independientes de la dimensión como sea posible. Nuestras visualizaciones que involucran flechas pueden ayudarnos a desarrollar la intuición de cómo se comportan los vectores, pero nuestras definiciones y teoremas mismos deberían funcionar tan bien en R7 (aunque realmente no podemos visualizar este espacio) como lo hacen en R3. Por esta razón, normalmente introducimos nuevos conceptos dando primero la definición algebraica, independiente de la dimensión, seguida de algunos ejemplos para ilustrar el significado geométrico del nuevo concepto. Comenzamos con la suma de vectores, la operación vectorial más simple que existe.
Definición: suponga que ![]() y
y ![]() son vectores.
son vectores.
Entonces su suma, denotada por v + w, es el vector:
![]()
La suma de vectores se puede motivar de al menos dos formas diferentes. Por un lado, es algebraicamente la operación más simple que razonablemente podría considerarse una forma de sumar dos vectores: la mayoría de los estudiantes, si se les pidiera sumar dos vectores, los sumarían entrada por entrada incluso si no hubieran visto la definición. Por otro lado, la suma de vectores también tiene una imagen geométrica simple en términos de flechas: si v y w se colocan de manera que la cola de w esté ubicada en el mismo punto que la cabeza de v (en cuyo caso decimos que v y w se colocan de cabeza a cola), entonces v + w es el vector que apunta desde la cola de v a la cabeza de w, como (a).
 17.49.13.png)
A) B)
En otras palabras, v + w representa el desplazamiento total acumulado al seguir v y luego a w. Si, en cambio, trabajamos completamente con vectores en posición estándar, entonces v + w es el vector que apunta a lo largo de la diagonal entre los lados v y w de un paralelogramo, como en B), a pesar de que las Imag0 del triángulo y del paralelogramo se ven diferentes, el vector v + w es el mismo en cada caso.
Antes de hacer uso de la suma de vectores, será útil conocer algunas de las propiedades básicas que satisface. Enumeramos dos de las propiedades más importantes en el siguiente teorema para facilitar la referencia.
a) v + w = w + v, (conmutatividad)
b) (v + w) + x = v + (w + x) (asociatividad)
Las dos propiedades de la suma de vectores que se describieron se denominan conmutatividad y asociatividad, respectivamente, y básicamente dicen que podemos hablar sin ambigüedades sobre la suma de cualquier conjunto de vectores sin tener que preocuparnos por el orden en el que realizamos la adición. Por ejemplo, este teorema muestra que expresiones como v + w + x tienen sentido, ya que no hay necesidad de cuestionar si significa (v + w) + x o v + (w + x).
Si bien ninguna de estas propiedades es sorprendente, es importante pensar cuidadosamente qué propiedades satisface cada operación vectorial cuando la presentamos. Más adelante presentaremos dos operaciones multiplicación de matrices que no son conmutativas (es decir, el orden de la “multiplicación” importa ya que ![]() , por lo que es importante tener cuidado de no asumir que las propiedades básicas como estas son válidas sin verificarlas primero.
, por lo que es importante tener cuidado de no asumir que las propiedades básicas como estas son válidas sin verificarlas primero.
Ejemplo 1: Calcule las siguientes sumas vectoriales:
a) (2, 5, −1) + (1, −1, 2),
b) (1, 2) + (3, 1) + (2, −1), y
c) la suma de los 8 vectores que apuntan desde el origen hasta las esquinas de
un cubo con esquinas opuestas en (0, 0, 0) y (1, 1, 1), como se muestra:
 18.01.13.png)
Solución
a) (2, 5, −1) + (1, −1, 2) = (2 + 1, 5−1, −1 + 2) = (3, 4, 1)
b) (1, 2) + (3,1) + (2,−1) = (1 + 3 + 2, 2 + 1−1) = (6, 2). Tenga en cuenta que esta suma se puede visualizar colocando los tres vectores de cabeza a cola, como se muestra a continuación. Este mismo procedimiento funciona para cualquier número de vectores.
 18.04.01.png)
c) Podríamos enumerar los 8 vectores y calcular explícitamente la suma, pero un método más rápido es notar que las sumas con muchos términos suelen ser más fáciles de evaluar si podemos explotar alguna forma de simetría, como lo hacemos aquí en el ejemplo (c) que los 8 vectores que estamos agregando son exactamente aquellos que tienen cualquier combinación de 0 y 1 en sus 3 entradas (es decir, (0, 0, 1), (1, 0, 1), etc.). Cuando los sumamos, en cualquier entrada dada, exactamente la mitad (es decir, 4) de los vectores tienen un 0 en esa entrada, y la otra mitad tiene un 1 allí. Por tanto, concluimos que la suma de estos vectores es (4, 4, 4).
0.3 Multiplicación escalar
La otra operación básica sobre los vectores que introducimos en este punto es una que cambia la longitud de un vector y/o invierte su dirección, pero no cambia la dirección en la que apunta.
Definición: suponga que ![]() es un vector y
es un vector y ![]() es un escalar. Entonces su multiplicación escalar, denotada por cv, es el vector
es un escalar. Entonces su multiplicación escalar, denotada por cv, es el vector
![]()
Nosotros "Escalar" simplemente significa "número". Observe que, una vez más, algebraicamente esta es exactamente la definición que alguien probablemente esperaría que tuviera la cantidad cv. Multiplicar cada entrada de v por c parece una operación bastante natural, y tiene la interpretación geométrica simple de estirar v por un factor de c, como
 18.11.11.png)
En particular, si | c | > 1 entonces la multiplicación escalar extiende v, pero si | c | <1 entonces encoge v. Cuando c <0 entonces esta operación también invierte la dirección de v, además de cualquier estiramiento o encogimiento que haga si ![]() .
.
Vale la pena señalar dos casos especiales de multiplicación escalar:
• Si c = 0 entonces cv es el vector cero, todas cuyas entradas son 0, que denotamos por 0.
• Si c = −1 entonces cv es el vector cuyas entradas son las negativas de las entradas de v, que denotamos por −v.
En otras palabras, también definimos que la resta de vectores también se realiza de la manera "obvia" de entrada en resta de vectores a través de v − w = v + (- w), y observamos que tiene la interpretación geométrica de que v − w es el vector que apunta desde la cabeza de w a la cabeza de v cuando v y w están en posición estándar. Quizás sea más fácil mantener recta esta imagen geométrica (“¿apunta desde la cabeza de qué vector a la cabeza del otro?”) Si pensamos en v − w como el vector que debe sumarse ah para obtener v (por lo que apunta de w a v). Alternativamente, v − w es la otra diagonal (además de v + w) en el paralelogramo con lados v y w, como
 18.16.05.png)
Es sencillo verificar algunas propiedades simples del vector cero, como los hechos de que v − v = 0 y v + 0 = v para cada vector ![]() , trabajando entrada por entrada con las operaciones vectoriales. También hay algunas otras formas sencillas en las que la multiplicación escalar interactúa con la suma de vectores, algunas de las cuales ahora enumeramos explícitamente para una fácil referencia.
, trabajando entrada por entrada con las operaciones vectoriales. También hay algunas otras formas sencillas en las que la multiplicación escalar interactúa con la suma de vectores, algunas de las cuales ahora enumeramos explícitamente para una fácil referencia.
0.4 Propiedades de la multiplicación escalar
Suponga que ![]() son vectores y
son vectores y ![]() son escalares. Entonces se cumplen las siguientes propiedades:
son escalares. Entonces se cumplen las siguientes propiedades:
a) c (v + w) = cv + cw,
b) (c + d) v = cv + dv, y
c) c (dv) = (cd) v.
La propiedad (a) dice que la multiplicación escalar se distribuye sobre la suma de vectores, y la propiedad (b) dice que la multiplicación escalar se distribuye sobre la suma de números reales.
Ejemplo 2: Calcule los vectores indicados:
a) 3v − 2w, donde v = (2, 1, −1) y w = (−1, 0, 3), y
b) la suma de los 6 vectores que apuntan desde el centro (0; 0) de un hexágono regular hasta sus esquinas, uno de los cuales está ubicado en (1; 0), como se muestra: 18.24.34.png)
Soluciones:
a) 3v − 2w = (6, 3, −3) - (- 2, 0, 6) = (8, 3, −9).
b) Podríamos usar trigonometría para encontrar las entradas de los 6 vectores explícitamente, pero una forma más fácil de calcular esta suma es etiquetar los vectores, en el sentido contrario a las agujas del reloj, comenzando en una ubicación arbitraria, (este método de como v, w, x , −v, −w, −x se puede resolver tiene la característica interesante de que todavía funciona incluso si giramos el hexágono o cambiamos el número de lados) dado que los 3 vectores finales apuntan en direcciones opuestas de los 3 primeros vectores). De ello se deduce que la suma es
v + w + x − v − w − x = 0.
Al hacer uso de estas propiedades de la suma vectorial y la multiplicación escalar, podemos resolver ecuaciones vectoriales de la misma manera que resolvemos ecuaciones que involucran números reales: podemos sumar y restar vectores en ambos lados de una ecuación, y multiplicar y dividir por escalares. en ambos lados de la ecuación, hasta que se aísle el vector desconocido. Ilustramos este procedimiento con algunos ejemplos.
Ejemplo 3. Resuelve las siguientes ecuaciones para el vector x:
a) x−(3,2,1) = (1,2,3)−3x
b) x+2(v+w) = −v−3(x−w)
Solución
x−(3,2,1) = (1,2,3)−3x
x=(4,4,4)-3x
4x=(4,4,4)
x=(1,1,1)
x+2(v+w) = −v−3(x−w)
x+2v+2w=-v-3x+3w
4x=-3v+w
x=1/4(w-3v)
0.5 Combinaciones lineales
Una tarea común en el álgebra lineal es comenzar con una colección dada de vectores ![]() y luego use la suma de vectores y la multiplicación escalar para construir nuevos vectores a partir de ellos. La siguiente definición da un nombre a este concepto.
y luego use la suma de vectores y la multiplicación escalar para construir nuevos vectores a partir de ellos. La siguiente definición da un nombre a este concepto.
Definición. Una combinación lineal de los vectores es cualquier vector de la forma
![]()
Veremos cómo determinar si un vector es o no una combinación lineal de un conjunto dado de vectores. Ejemplo, (1, 2, 3) es una combinación lineal de los vectores (1, 1, 1) y (−1, 0, 1) ya que (1, 2, 3) = 2 (1, 1, 1) + (−1, 0, 1). Por otro lado, (1, 2, 3) no es una combinación lineal de los vectores (1, 1, 0) y (2, 1, 0) ya que todo vector de la forma c1 (1, 1, 0) + c2 (2, 1, 0) tiene un 0 en su tercera entrada y, por lo tanto, no es posible que sea igual a (1, 2, 3). Cuando se trabaja con combinaciones lineales, algunos vectores particularmente importantes son aquellos con todas las entradas iguales a 0, excepto una única entrada que es igual a 1. Específicamente, para cada j = 1, 2,…;n, definimos el vector ![]() por
por
![]()
Siempre que usemos para estos vectores, la dimensión de ![]() quedará clara a partir del contexto o al decir cosas como
quedará clara a partir del contexto o al decir cosas como ![]() . Por ejemplo, en R2 hay dos de estos vectores: e1 = (1, 0) y e2 = (0, 1). De manera similar, en R3 hay tres de estos vectores:
. Por ejemplo, en R2 hay dos de estos vectores: e1 = (1, 0) y e2 = (0, 1). De manera similar, en R3 hay tres de estos vectores:
e1 = (1, 0, 0), e2 = (0, 1, 0) y e3 = (0,0, 1). En general, en Rn hay n de estos vectores, e1, e2;…, en, y los llamamos vectores de base estándar (por las razones que discutiremos más adelante). Observe que en R2 y R3, estos son los vectores que apuntan a una distancia de 1 en la dirección de los ejes x, y y z, como
 14.38.15.png)
Por ahora, la razón de nuestro interés en estos vectores básicos estándar es que cada vector ![]() puede escribirse como una combinación lineal de ellos. En particular, si
puede escribirse como una combinación lineal de ellos. En particular, si ![]() Cuando vemos expresiones como esta, es útil recordarnos el “tipo” de cada objeto:
Cuando vemos expresiones como esta, es útil recordarnos el “tipo” de cada objeto: ![]() son escalares
son escalares ![]() son vectores.
son vectores.
![]()
que se puede verificar simplemente calculando cada una de las entradas de la combinación lineal de la derecha. Esta idea de escribir vectores en términos de los vectores base estándar es una de las técnicas más útiles que utilizamos en álgebra lineal: en muchas situaciones, si podemos probar que algunos con la propiedad líneal se cumple para los vectores base estándar, entonces podemos usar combinaciones lineales para mostrar que debe ser válida para todos los vectores.
Ejemplo 4. Calcule las combinaciones lineales indicadas de vectores base estándar:
a) Calcule ![]() , y
, y
b) Escrito ( 3, 5,− 2,− 1) es una combinación lineal ![]() .
.
Soluciones:
a) 3e1−2e2 + e3 = 3 (1, 0, 0) −2 (0, 1, 0) + (0, 0, 1) = (3, −2, 1). En general, al sumar múltiplos de los vectores base estándar, el vector resultante tiene el coeficiente de e1 en su primera entrada, el coeficiente de e2 en su segunda entrada, y así sucesivamente.
b) Al igual que en el inciso a), las entradas de los vectores son los escalares en la combinación lineal: (3, 5, −2, −1) = 3e1 + 5e2−2e3 − e4.
En este punto, parece natural preguntarse por qué hemos definido la suma de vectores v + w y la multiplicación escalar cv de las formas "obvias" de entrada, pero no hemos definido de manera similar el producto de entrada de dos vectores:
![]()
La respuesta es simplemente que la multiplicación de vectores por entradas no es particularmente útil; no suele surgir en problemas del mundo real o desempeña un papel en estructuras matemáticas más avanzadas, ni tiene una interpretación geométrica simple. Hay otras formas más útiles de "multiplicar" vectores, llamadas producto escalar y producto cruzado, que exploramos más adelante.
0.6 Longitudes, ángulos y el producto escalar
Al discutir las propiedades geométricas de los vectores, como su longitud o el ángulo entre ellos, nos gustaría que nuestras definiciones fueran lo más independientes de la dimensión posible, de modo que sea tan fácil discutir la longitud de un vector en R7 como lo es discuta la longitud de uno en R2. Al principio, puede resultar algo sorprendente que discutir la longitud de un vector en espacios de alta dimensión sea algo que podamos hacer en absoluto; después de todo, no podemos visualizar nada más allá de las 3 dimensiones. Por lo tanto, enfatizamos que las definiciones de longitud y ángulo independientes de la dimensión que presentamos en esta sección no son teoremas que probamos, sino más bien definiciones que adoptamos para que satisfagan las propiedades geométricas básicas que las longitudes y los ángulos "deberían" satisfacer.
0.7 El producto punto
La principal herramienta que nos ayuda a extender las nociones geométricas de R2 y R3 a dimensiones arbitrarias es el producto escalar, que es una forma de combinar dos vectores para crear un solo número:
Definición. Suponga que ![]() y
y ![]() son vectores.
son vectores.
Entonces su producto escalar, denotado por ![]() , es la cantidad
, es la cantidad
![]()
Es importante tener en cuenta que la salida del producto escalar es un número real, no es un vector. Entonces, por ejemplo, la expresión v · (w · x) no tiene sentido, ya que w · x es un número, por lo que no podemos tomar su producto escalar con v. Por otro lado, la expresión v / (w · x) tiene sentido, ya que dividir un vector por un número es una operación matemática válida. A medida que introduzcamos más operaciones entre diferentes tipos de objetos, será cada vez más importante tener en cuenta el tipo de objeto con el que estamos trabajando en todo momento.
Ejemplo 1. Calcule (o indique por qué es imposible calcular) el siguiente
producto punto:
a) (1,2,3) · (4−3,2),
b) (3,6,2) · (−1,5,2,1),
Solución
a) ( 1, 2, 3) · ( 4,− 3,2) = 1 x 4 + 2 x(− 3)+ 3 x 2 = 4− 6+ 6 = 4.
b) (3,6,2) · (−1,5,2,1)no existe, ya que estos vectores no tienen
el mismo número de entradas.
El producto escalar se puede interpretar geométricamente como una medida aproximada de la cantidad de superposición entre v y w. Por ejemplo, si v = w = (1, 0) entonces v · w = 1, pero a medida que rotamos w alejándonos de v, su producto escalar disminuye a 0 cuando v y w son perpendiculares (es decir, cuando w = (0,1) o w=(0,−1)), como
 13.47.13.png)
Luego disminuye aún más hasta −1 cuando w apunta en la dirección opuesta de v (es decir, cuando w = (−1, 0)). Más específicamente, si giramos w en sentido antihorario desde v en un ángulo de ![]() , entonces sus coordenadas se convierten en
, entonces sus coordenadas se convierten en
w =(cos ( ), sin (
), sin ( ))
))
El producto escalar entre v y w es entonces v · w = 1cos ( ) + 0sin (
) + 0sin ( ) = cos (
) = cos ( ), que es mayor cuando
), que es mayor cuando  es pequeño (es decir, cuando w apunta casi en la misma dirección que v).
es pequeño (es decir, cuando w apunta casi en la misma dirección que v).
Antes de que podamos hacer uso del producto escalar, debemos tomar conciencia de las propiedades matemáticas que satisface. El siguiente teorema cataloga las más importantes de estas propiedades, ninguna de las cuales es particularmente sorprendente o difícil de probar.
Suponga que ![]() son vectores y
son vectores y ![]() es un escalar. Entonces se mantienen las siguientes propiedades:
es un escalar. Entonces se mantienen las siguientes propiedades:
![]()
0.8 Longitud o módulo del vector
En 2 o 3 dimensiones, podemos usar técnicas geométricas para calcular la longitud de un vector v, que representamos por ![]() . La longitud de un vector
. La longitud de un vector ![]() se puede calcular observando que
se puede calcular observando que ![]() , por lo que v forma la hipotenusa de un triángulo rectángulo con lados más cortos dados por los vectores
, por lo que v forma la hipotenusa de un triángulo rectángulo con lados más cortos dados por los vectores ![]() y
y ![]() , como
, como
 10.51.44.png)
Dado que la longitud de ![]() es
es ![]() y la longitud de
y la longitud de ![]() es
es ![]() , por el teorema teorema de Pitágoras
, por el teorema teorema de Pitágoras
![]()
Este argumento todavía funciona, pero es un poco más complicado, para vectores tridimensionales ![]() . En este caso, escribimos v = (v1, v2, 0) + (0, 0, v3), de modo que v forme la hipotenusa de un triángulo rectángulo con lados más cortos dados por los vectores (v1; v2; 0 ) y (0, 0, v3), como en la figura anterior. Dado que la longitud de (v1, v2, 0) es
. En este caso, escribimos v = (v1, v2, 0) + (0, 0, v3), de modo que v forme la hipotenusa de un triángulo rectángulo con lados más cortos dados por los vectores (v1; v2; 0 ) y (0, 0, v3), como en la figura anterior. Dado que la longitud de (v1, v2, 0) es ![]() (es solo un vector en R2 con un "0" adicional de entrada agregada) y la longitud de (0, 0, v3) es
(es solo un vector en R2 con un "0" adicional de entrada agregada) y la longitud de (0, 0, v3) es ![]() , el teorema de Pitágoras nos dice que
, el teorema de Pitágoras nos dice que
![]()
Cuando consideramos vectores de dimensiones superiores, ya no podemos visualizarlos tan fácilmente como podríamos en los casos de 2 y 3 dimensiones, por lo que no es necesariamente obvio lo que queremos decir con la "longitud" de un vector, por ejemplo en R7. En estos casos, simplemente definimos la longitud de un vector para continuar con el patrón que observamos anteriormente.
Definición. La longitud de un vector ![]() , denotado por
, denotado por ![]() , es el
, es el
cantidad
![]()
Vale la pena señalar que esta definición tiene sentido, ya que la cantidad ![]() no es negativa, por lo que podemos sacar su raíz cuadrada. Para tener una idea de cómo funciona la longitud de un vector, calculamos la longitud de algunos vectores.
no es negativa, por lo que podemos sacar su raíz cuadrada. Para tener una idea de cómo funciona la longitud de un vector, calculamos la longitud de algunos vectores.
Ejemplo 2. Calcule las longitudes de los siguientes vectores:
a) (2, −5, 4, 6),
b) ![]() , y
, y
c) La diagonal principal de un cubo en R3 con una longitud de lado 1.
Solución
a) ![]()
b) ![]()
c) El cubo con longitud de lado 1 se puede colocar de modo que tenga un vértice en
(0, 0, 0) y su vértice opuesto en (1, 1, 1), como se muestra a continuación:
 11.35.53.png)
La diagonal principal de este cubo es el vector v = (1, 1, 1), que tiene
largo
![]()
Ahora comenzamos a describir las propiedades básicas de la longitud de un vector. Nuestro primer teorema solo presenta dos propiedades muy simples que deberían esperarse geométricamente: si multiplicamos un vector por un escalar, entonces su longitud se multiplica por el valor absoluto de la cantidad, y el vector cero es el único vector con una longitud igual a 0 ( todos los demás vectores tienen longitud positiva).
![]()
A menudo es particularmente útil centrar la atención en los vectores unitarios: vectores con longitud igual a 1. Los vectores unitarios a menudo surgen en situaciones en las que la dirección del vector es importante, pero su longitud no lo es. Es importante destacar que nos dice que siempre podemos cambiar la escala de cualquier vector para que tenga una longitud 1 simplemente dividiendo el vector por su longitud, como en:
 11.43.01.png)
![]()
Cambiar la escala de un vector como este para que tenga una longitud de 1 se llama normalización. Como resultado del hecho de que podemos cambiar la escala de vectores como este, hay exactamente un vector unitario que apunta en cada dirección, y podemos pensar en el conjunto de todos los vectores unitarios en R2 como el círculo unitario, en R3 como la esfera unitaria. y así sucesivamente, como en la figura anterior de la derecha. Además, siempre podemos descomponer los vectores en el producto de su longitud y dirección. Es decir, podemos escribir todo vector distinto de cero ![]() .
.
en la forma ![]() , donde
, donde ![]() es el vector unitario único que apunta en la misma dirección que v.
es el vector unitario único que apunta en la misma dirección que v.
La siguiente propiedad que observamos es una desigualdad que relaciona las longitudes de dos vectores con su producto escalar. La intuición de este teorema proviene de
 11.50.53.png)
donde notamos que el producto escalar del vector v = (1, 0) con cualquier otro vector de longitud 1 siempre estuvo entre -1 y 1. En general, el producto escalar de dos los vectores no pueden ser "demasiado grandes" en comparación con las longitudes de los vectores.
Suponga que ![]() son vectores. Entonces
son vectores. Entonces ![]() .
.
Si bien usaremos repetidamente la desigualdad de Cauchy-Schwarz a medida que avancemos en este libro, por ahora tiene dos aplicaciones inmediatas e importantes. La primera es que nos permite probar una propiedad final de las longitudes de los vectores: el hecho de que ![]() nunca es mayor que
nunca es mayor que ![]() . Para tener una idea de por qué es así, simplemente recuerde que en
. Para tener una idea de por qué es así, simplemente recuerde que en ![]() y
y ![]() , los vectores v, w y v + w pueden organizarse para formar los lados de un triángulo, como en
, los vectores v, w y v + w pueden organizarse para formar los lados de un triángulo, como en
 14.43.25.png)
La desigualdad ![]() simplemente dice que la longitud de un lado de un triángulo nunca es más grande que la suma de las longitudes de los otros dos lados.
simplemente dice que la longitud de un lado de un triángulo nunca es más grande que la suma de las longitudes de los otros dos lados.
Suponga que ![]() son vectores. Entonces
son vectores. Entonces ![]() .
.
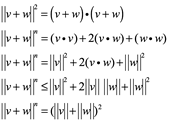
Luego podemos sacar la raíz cuadrada de ambos lados de la desigualdad anterior para ver ![]() como se desee.
como se desee.
La otra aplicación inmediata de la desigualdad de Cauchy-Schwarz es que nos da una forma de discutir el ángulo entre vectores.
El ángulo entre vectores Para tener una idea de cómo discutir el ángulo entre vectores en términos de cosas como el producto escalar, primero nos enfocamos en los vectores en R2 o R3. En estos casos de dimensiones inferiores, podemos usar técnicas geométricas para determinar el ángulo entre dos vectores v y w. Si ![]() , entonces podemos colocar v y w en la posición estándar, de modo que los vectores v, w y v − w formen los lados de un triángulo, como
, entonces podemos colocar v y w en la posición estándar, de modo que los vectores v, w y v − w formen los lados de un triángulo, como
 15.28.45.png)
entonces puede usar la ley de los cosenos para relacionar ![]() ,
, ![]() ,
, ![]() , y el ángulo
, y el ángulo ![]() entre v y w. Específicamente, encontramos que
entre v y w. Específicamente, encontramos que
![]()
![]()
![]()
Simplificar y reorganizar esta ecuación da una fórmula para ![]() en términos de producto:
en términos de producto:
![]()
![]()
Este argumento todavía funciona, pero es un poco más complicado de visualizar, cuando se trabaja con vectores ![]() que son tridimensionales. En este caso, todavía podemos organizar v, w y v − w para formar un triángulo, y el cálculo que hicimos en R2 es exactamente el mismo: el único cambio es que el triángulo está incrustado en un espacio tridimensional, como la figura anterior derecha.
que son tridimensionales. En este caso, todavía podemos organizar v, w y v − w para formar un triángulo, y el cálculo que hicimos en R2 es exactamente el mismo: el único cambio es que el triángulo está incrustado en un espacio tridimensional, como la figura anterior derecha.
Cuando consideramos vectores en espacios de dimensiones superiores, ya no tenemos una guía visual de lo que significa el ángulo entre dos vectores, por lo que simplemente definimos el ángulo para que sea consistente con la fórmula que derivamos anteriormente:
El ángulo ![]() entre dos vectores v distintos de cero;
entre dos vectores v distintos de cero; ![]() es la cantidad
es la cantidad
![]()
Vale la pena señalar que normalmente medimos ángulos en radianes, no en grados. Además, la desigualdad de Cauchy-Schwarz es muy importante a la hora de definir el ángulo entre vectores de esta forma, ya que asegura que la fracción ![]() esté entre −1 y 1, que es lo que requerimos para su arcocoseno existe en primer lugar.
esté entre −1 y 1, que es lo que requerimos para su arcocoseno existe en primer lugar.
Ejemplo 3. Calcule el ángulo entre los siguientes pares de vectores:
a) v = (1, 2) y w = (3, 4),
b) v = (1, 2, −1, −2) y w = (1, −1, 1, −1), y
c) Las diagonales de dos caras adyacentes de un cubo.
Solución
![]()
b)
![]() entonces el ángulo entre v y w es
entonces el ángulo entre v y w es
![]()
c) El cubo con longitud de lado 1 se puede colocar de modo que tenga un vértice en
(0, 0, 0) y su vértice opuesto en (1,1, 1). Hay muchos pares de diagonales faciales que podríamos elegir, por lo que elegimos (arbitrariamente) las diagonales faciales
v = (1, 0, 1) - (1, 1, 0) = (0, −1, 1) y w = (0, 1, 1) - (1, 1, 0) = (−1, 0, 1), como se muestra a continuación.
 15.57.57.png)
Entonces v · w = 0 + 0 + 1 = 1,
![]()
entonces el ángulo entre v y w es
![]()
En la parte (b) del ejemplo anterior, pudimos concluir que el ángulo entre v y w era ![]() basándonos únicamente en el hecho de que v · w = 0 (ya que arccos (0) =
basándonos únicamente en el hecho de que v · w = 0 (ya que arccos (0) = ![]() ). Esta implicación es en ambos sentidos (es decir, si el ángulo entre dos vectores es
). Esta implicación es en ambos sentidos (es decir, si el ángulo entre dos vectores es ![]() , entonces su producto escalar es igual a 0) y es un caso especial lo suficientemente importante como para obtener su propio nombre.
, entonces su producto escalar es igual a 0) y es un caso especial lo suficientemente importante como para obtener su propio nombre.
Se dice que dos vectores ![]() son ortogonales si v · w = 0.
son ortogonales si v · w = 0.
Pensamos en la palabra “ortogonal” como sinónimo de “perpendicular” en pequeñas dimensiones, ya que esto es exactamente lo que significa en R2 y R3 (recuerde que un ángulo de ![]() radianes es 90 grados) —ver:
radianes es 90 grados) —ver:
Sin embargo, la ortogonalidad también se aplica a situaciones de dimensiones superiores (por ejemplo, los dos vectores ![]() para los ejemplos siguientes son ortogonales, a pesar de que no podemos visualizarlos.
para los ejemplos siguientes son ortogonales, a pesar de que no podemos visualizarlos.
 16.16.28.png)
0.9 Matrices y operaciones con matrices
Un concepto más que necesitaremos antes de comenzar a trabajar con álgebra lineal es el de una matriz, en una matriz 2D de números las filas y columnas deben alinearse entre sí, y cada punto de la matriz (es decir, cada intersección de una fila y una columna se le llama celda o entrada) debe contener una entrada. Tenga en cuenta que cada fila de una matriz debe tener el mismo número de entradas que cualquier otra fila y, de manera similar, cada columna debe tener el mismo número de entradas. Por ejemplo:

Normalmente denotamos matrices con letras mayúsculas como A, B, C,…, y escribimos sus entradas mediante las letras minúsculas correspondientes, junto con subíndices que indican de qué fila y columna (en ese orden) proviene la entrada. Por ejemplo, si A y B son como arriba, entonces ![]() , ya que la entrada de A en la primera fila y la segunda columna es 3. De manera similar,
, ya que la entrada de A en la primera fila y la segunda columna es 3. De manera similar, ![]() y
y ![]() . La entrada en la i-ésima fila y la j-ésima columna también se denominan su “entrada (i, j)”, y algunas veces la denotamos alternativamente usando corchetes como
. La entrada en la i-ésima fila y la j-ésima columna también se denominan su “entrada (i, j)”, y algunas veces la denotamos alternativamente usando corchetes como ![]() .
.
El número de filas y columnas que tiene una matriz se denomina colectivamente su tamaño o dimensión, y siempre enumeramos el número de filas primero. Por ejemplo, la matriz A anterior tiene un tamaño de 2 × 2, mientras que B tiene un tamaño de 2 × 3.
0.10 Suma de matrices y multiplicación escalar
Todavía no tenemos una buena interpretación geométrica de las matrices como la que teníamos para los vectores (desarrollaremos una comprensión geométrica de las matrices en el estudio de su teoría), pero por ahora notamos que podemos definir la suma y la multiplicación escalar para matrices exactamente de la misma manera de entrada que hicimos para los vectores.
Suponga que ![]() son matrices y
son matrices y ![]() es un escalar. Entonces la suma A + B y la multiplicación escalar cA son las matrices m × n cuyas (i; j) - entradas, para cada
es un escalar. Entonces la suma A + B y la multiplicación escalar cA son las matrices m × n cuyas (i; j) - entradas, para cada ![]() , son
, son
![]()
![]()
También usamos O para denotar la matriz cero cuyas entradas son todas iguales a 0, si deseamos enfatizar o aclarar que es m × n, o On si es n × n. De manera similar, definimos la resta de la matriz (A − B = A + (- 1) B) y el negativo de una matriz (−A = (−1) A) en las formas obvias de entrada. No hay nada elegante o sorprendente en cómo funcionan estas operaciones matriciales, pero vale la pena trabajar con un par de ejemplos rápidos para asegurarse de que nos sentimos cómodos con ellos.
Dadas las matrices:
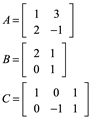
Calcular:
a) A+B
b) 2A-3B
c) A+2C
Solución:
![]()
![]()
Esta expresión no tiene sentido; no podemos sumar o restar matrices que tienen diferentes tamaños (A es una matriz de 2 × 2, pero 2C es una matriz de 2 × 3).
Como era de esperar, la suma de matrices y la multiplicación escalar satisfacen las mismas propiedades algebraicas como conmutatividad y asociatividad que vimos para los vectores en los teoremas. Para completar, declaramos estas propiedades explícitamente, pero enfatizamos que ninguna de ellas debe ser sorprendente.
Suponga que ![]() son matrices m × n y
son matrices m × n y ![]() son escalares. Luego
son escalares. Luego
a) A+B = B+A, (conmutativa)
b) (A+B)+C = A+(B+C), (asociativa)
c) c(A+B) = cA+cB, (distributiva)
d) (c+d)A = cA+dA, and (distributiva)
e) c(dA) = (cd)A.
0.11 Multiplicación de matrices
Si bien la suma de matrices y la multiplicación escalar no son en cierto sentido nada nuevo, ahora presentamos el método estándar para multiplicar matrices, que es muy nuevo y parece bastante poco intuitivo al principio.
Si ![]() y
y ![]() son matrices, entonces su producto AB es la matriz m × p cuya entrada (i, j), para
son matrices, entonces su producto AB es la matriz m × p cuya entrada (i, j), para
![]()
![]()
En otras palabras, el producto AB es la matriz cuyas entradas son todos los posibles productos escalares de las filas de A con las columnas de B, como se ilustra en la figura
Antes de continuar con algunos ejemplos, enfatizamos que el producto matricial AB solo tiene sentido si A tiene el mismo número de columnas que B tiene filas. Por ejemplo, no tiene sentido multiplicar una matriz de 2 × 3 por otra matriz de 2 × 3, pero sí tiene sentido multiplicar una matriz de 2 × 3 por una
Matriz 3 × 7.
 12.12.46.png)
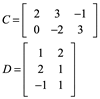
Calcule cada uno de los productos de la matriz indicados a continuación (si es posible) si:
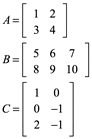
a) AB
b) AC
c) BA
d) BC
 12.17.30.png)
AC no existe ya que A tiene 2 columnas pero C tiene 3 filas, y esos números tendrían que coincidir para que exista el producto de la matriz.
BA no existe ya que B tiene 3 columnas pero A tiene 2 filas, y esos números tendrían que coincidir para que exista el producto de la matriz.
 12.19.06.png)
Al realizar la multiplicación de matrices, es una buena idea verificar con frecuencia que los tamaños de las matrices con las que estamos trabajando realmente tengan sentido. En particular, las dimensiones internas de las matrices deben ser iguales, y las dimensiones externas de las matrices serán las dimensiones del producto matricial:
 12.20.29.png)
Dado que la multiplicación de matrices es mucho menos sencilla que las otras operaciones de vectores y matrices que hemos introducido, no está claro de inmediato qué propiedades satisface. Por lo tanto, realizar un seguimiento de estas propiedades es algo más importante que para, por ejemplo, la suma de vectores:
Sean A, B y C matrices (con tamaños tales que las multiplicaciones y adiciones siguientes tengan sentido) y sea ![]() un escalar. Luego
un escalar. Luego
a) (AB)C = A(BC), (asociativa)
b) A(B+C) = AB+AC, (distributiva)
c) (A+B)C = AC+BC, and (distributiva)
d) c(AB) = (cA)B.
Vale la pena enfatizar el hecho de que no enumeramos la conmutatividad (es decir, ![]() ) como una de las propiedades de la multiplicación de matrices en el Teorema. La razón de esta omisión es simple: no es cierto. Vimos que es muy posible que BA ni siquiera exista cuando AB sí. Incluso una operación que no sea conmutativa debería ser nuestra suposición predeterminada, ya que el orden en el que ocurren los eventos es importante. Preferiríamos perder todo nuestro dinero y luego obtener un millón de dólares, en lugar de obtener un millón de dólares y luego perder todo nuestro dinero. Si existen AB y BA, pueden tener o no el mismo tamaño que el otro, e incluso si son del mismo tamaño, es posible que no sean iguales entre sí.
) como una de las propiedades de la multiplicación de matrices en el Teorema. La razón de esta omisión es simple: no es cierto. Vimos que es muy posible que BA ni siquiera exista cuando AB sí. Incluso una operación que no sea conmutativa debería ser nuestra suposición predeterminada, ya que el orden en el que ocurren los eventos es importante. Preferiríamos perder todo nuestro dinero y luego obtener un millón de dólares, en lugar de obtener un millón de dólares y luego perder todo nuestro dinero. Si existen AB y BA, pueden tener o no el mismo tamaño que el otro, e incluso si son del mismo tamaño, es posible que no sean iguales entre sí.
0.12 Potencias de la matriz
Una matriz cuadrada particularmente importante es la que consta completamente de 0 entradas, excepto con 1 en su diagonal (es decir, su (1, 1) -entrada, (2, 2) -entrada, (3,3) - entrada , y así sucesivamente, todos iguales 1). Esto se llama matriz de identidad, y si tiene un tamaño n × n, entonces se denota por In (o si su tamaño es claro por el contexto o es irrelevante, lo denotamos solo por I). Por ejemplo, las matrices de identidad en M2 y M3 son

La razón por la que la matriz de identidad es tan importante es que multiplicarla por otra matriz no cambia esa otra matriz (similar a cómo la matriz cero "no hace nada" en la suma de matrices, la matriz de identidad "no hace nada" en la multiplicación de matrices):
Si ![]() entonces
entonces ![]() .
.
![]()
![]()
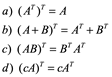
0.13 La transposición
Ahora introducimos una operación sobre matrices que cambia la forma de una matriz, pero no su contenido. Específicamente, intercambia el rol de las filas y columnas de una matriz:
Suponga que ![]() es una matriz de m × n. Entonces su transpuesta, que denotamos por
es una matriz de m × n. Entonces su transpuesta, que denotamos por ![]() , es la matriz n × m cuya entrada (i, j) es
, es la matriz n × m cuya entrada (i, j) es ![]() .
.
Otra forma de pensar sobre la transposición es reflejar las entradas de A en su diagonal principal:
 12.38.59.png)
 12.40.20.png)
0.14 Matrices de bloques
A menudo hay patrones en las entradas de una matriz grande, y podría ser útil dividir esa matriz grande en trozos más pequeños basándose en alguna partición de sus filas y columnas. Por ejemplo, si
 12.45.10.png)
entonces podemos descomponer A y B a veces llamado submatrices en bloques que son individualmente bastante simples
 12.45.18.png)
Entonces reconocemos dos de los bloques de A como I3 (la matriz identidad de 3 × 3) y algunos de los bloques de A y B como la matriz cero O. Si llamamos a los bloques restantes
entonces podemos escribir A y B en términos de C y D de la siguiente manera:

Cuando A y B se escriben de esta manera, como matrices cuyas entradas son en sí mismas matrices, se denominan matrices de bloque. Lo notable de las matrices de bloques es que podemos multiplicarlas como si fueran matrices regulares. Por ejemplo, si queremos calcular la matriz AB, en lugar de calcular el producto a lo largo (es decir, calcular 4 · 5 = 20 productos punto de vectores de 6 dimensiones), podemos simplemente multiplicarlos como matrices de bloques de 2 × 2:
 12.49.45.png)
No es difícil calcular ![]() , por lo que se sigue que
, por lo que se sigue que
 12.51.26.png)
que es la misma respuesta que habríamos obtenido si hubiéramos multiplicado A y B directamente. En general, la multiplicación de matrices de bloques como esta es válida. siempre que elijamos los tamaños de los bloques para que todas y cada una de las multiplicaciones de matrices que se realizan tengan sentido, en cuyo caso decimos que las matrices de bloques tienen particiones adaptables.
Multiplicación de matrices:
 12.58.34.png)
0.15 Transformaciones lineales
El ingrediente principal final del álgebra lineal, después de los vectores y las matrices, son las transformaciones lineales: funciones que actúan sobre los vectores y que no “estropean” la suma de vectores y la multiplicación escalar. A pesar de ser el objeto más abstracto y difícil de comprender, son de suma importancia e impregnan todo el álgebra lineal, por lo que se anima al lector a explorar esto a fondo.
Una transformación lineal es una función ![]() que satisface las siguientes dos propiedades:
que satisface las siguientes dos propiedades:
a) T (v + w) = T (v) + T (w) para todos los vectores ![]() , y
, y
b) T (cv) = cT (v) para todos los vectores ![]() y todos los escalares
y todos los escalares ![]()
____________________________________
Autores:
Eduardo Ochoa Hernández
Nicolás Zamudio Hernández
Lizbeth Guadalupe Villalon Magallan
Mónica Rico Reyes
Pedro Gallegos Facio
Gerardo Sánchez Fernández
Rogelio Ochoa Barragán