Texto universitario
_____________________________
Módulo 1. Fundamentos de la geometría
1.1 Antecedentes
En la geometría para llegar a calcular las líneas que se buscan y para disponerlas a ser conocidas, añadimos o sustraemos otras relacionándolas con números de proporciones entre ellas, obteniendo la raíz cuadrada, cúbica…, la idea es encontrar ecuaciones para resolver problemas en el espacio.
En general, podríamos describir la geometría como el estudio matemático del mundo físico que nos rodea, si consideramos que se extiende indefinidamente. Más específicamente, podríamos definir la geometría como la investigación matemática de la medida, las propiedades dimensionales y relaciones de puntos, líneas, ángulos, formas, superficies y sólidos. Es comúnmente aceptado que los métodos básicos de geometría fueron descubiertos y utilizados por primera vez en la vida cotidiana por los egipcios y los babilonios. Es notable que pudieran calcular áreas y volúmenes simples y que se hubieren aproximado al valor de π (la razón de la circunferencia al diámetro de un círculo).
Sin embargo, aunque los egipcios y los babilonios habían dominado indudablemente algunas técnicas geométricas, no habían formado un sistema matemático de geometría como ciencia teórica que comprendiera definiciones, teoremas y pruebas. Esto fue iniciado por los griegos, aproximadamente durante el siglo VII a.C. Es fácil comprender intuitivamente el origen del término geometría, si estudiamos etimológicamente el significado del término. La palabra geometría se origina de la palabra griega
 13.39.43.png)
que está formada por otras dos palabras griegas: la palabra γη, que significa tierra y la palabra
 13.41.09.png) ,
,
que significa medida. Por lo tanto, la geometría en realidad significa la medición de la tierra, y originalmente, eso es exactamente lo que era antes de los griegos. Por ejemplo, aproximadamente en 240 a.C., el matemático griego Eratóstenes utilizó métodos básicos pero ingeniosos de geometría que fueron desarrollados teóricamente por varios matemáticos griegos antes de su tiempo, para medir la circunferencia de la Tierra. Vale la pena mencionar que logró hacerlo, con un error de menos del 2% en comparación con la longitud exacta de la circunferencia tal como la conocemos hoy. Por lo tanto, es evidente que la geometría surgió de la actividad práctica.
La geometría fue desarrollada gradualmente como una ciencia teórica abstracta por matemáticos/filósofos, como Thales, Pitágoras, Platón, Apolonio, Euclides y otros. Más específicamente, Thales, además de su teorema de intercepción, es también el primero matemático a quien se le atribuye el concepto de prueba por inducción. Además, Pitágoras creó una escuela conocida como los pitagóricos, que descubrieron numerosos teoremas en geometría. Se dice que Pitágoras es el primero en proporcionar una prueba deductiva de lo que se conoce como el Teorema de Pitágoras.
Teorema de Pitágoras. En cualquier triángulo rectángulo con lados de longitudes a, b, c, donde c es la longitud de la hipotenusa, contiene
a2 + b2 = c2. Ec. (1.1)
El teorema anterior ha captado el interés de geómetras y teóricos de los números durante miles de años. Se han presentado cientos de pruebas desde la época de Pitágoras. Es divertido mencionar que incluso el vigésimo presidente de los Estados Unidos, J.A. Garfield estaba tan interesado en este teorema que logró descubrir una prueba propia en 1876[1]. El aspecto teórico numérico del teorema de Pitágoras es el estudio de los valores enteros a, b, c, que satisfacen la ecuación. Ec.(1.1) Tales triples de enteros (a, b, c) se llaman triples pitagóricos[2]. Los matemáticos mostraron un gran interés en tales propiedades de los enteros y eventualmente fueron conducidos a la investigación de la resolución de ecuaciones de la forma.
![]()
Donde a,b,c pertenecen a los enteros positivos ![]() , y
, y ![]() .
.
Estos estudios conducen después de cientos de años a la prueba célebre de Wiles del último teorema de Fermat, en 1995[3].
Teorema último de Fermat, se mantiene
![]()
Para cada a,b,c pertenecen a los enteros positivos , y
![]() .
.
Volvamos ahora a los orígenes de la geometría. La primera base rigurosa que hizo de esta disciplina un sistema matemático bien formado se proporcionó en Elementos de Euclides en aproximadamente 300 a. C. Los Elementos son un tratado matemático tan único que no hubo necesidad de ningún tipo de adiciones o modificaciones durante más de 2000 años, hasta la época del gran matemático ruso N.I. Lobacevskii (1792-1856) que desarrolló un nuevo tipo de geometría, conocida como geometría hiperbólica, en la que no se consideró el postulado paralelo de Euclides.
Algunas palabras sobre los Elementos de Euclides. Durante más de 2000 años, los Elementos habían sido el punto de referencia absoluto del razonamiento matemático deductivo. El texto en sí y algunas adaptaciones del mismo por parte de grandes matemáticos, como A.M. Legendre (1752-1833) y J. Hadamard (1865-1963) atrajeron muchas mentes carismáticas a las Matemáticas. Es suficiente recordar que fue la lectura de los Elementos de Legendre lo que atrajo a E. Galois (1811-1832), uno de los mejores algebraistas de todos los tiempos en las Matemáticas.
Los Elementos de Euclides comprenden 13 volúmenes que el mismo Euclides compuso en Alejandría alrededor del 300 a. C. Más específicamente, los primeros cuatro volúmenes tratan con figuras, como triángulos, círculos y cuadriláteros. Los volúmenes quinto y sexto estudian temas como figuras similares. Los siguientes tres volúmenes tratan de una forma primaria de teoría elemental de números, y el resto estudia temas relacionados con la geometría. Se cree que los Elementos fundaron la lógica y la ciencia moderna. En Elementos, Euclides presentó algunas afirmaciones llamadas axiomas, que consideró como un conjunto de premisas evidentes en las que basaría su sistema matemático. Además de los axiomas, Euclides presentó cinco afirmaciones adicionales llamadas postulados, cuya validez parecía menos segura que los axiomas, pero aún se consideraban evidentes en su verdad portadora.
Los axiomas
1. Las cosas que son iguales a la misma cosa también son iguales entre sí.
2. Si se deben agregar iguales a iguales, entonces los enteros serán iguales.
3. Si se restan iguales de iguales, entonces el resto será igual.
4. Las cosas que coinciden entre sí son iguales entre sí.
5. El todo es mayor que la parte.
Los postulados
1. Hay un segmento de línea recta único que conecta dos puntos.
2. Cualquier segmento de línea recta puede extenderse indefinidamente (continuamente) en una línea recta.
3. Existe un círculo con cualquier centro y cualquier valor para su radio.
4. Todos los ángulos rectos son iguales entre sí.
5. Si una línea recta se cruza con otras dos líneas rectas, de tal manera que la suma de los ángulos internos en el mismo lado es menor que dos ángulos rectos, entonces las dos líneas rectas eventualmente se encontrarán si se extienden indefinidamente.
Con respecto a los primeros cuatro postulados de Euclides, el eminente físico matemático R. Penrose (1931–) en su libro The Road to Reality: A Complete Guide to the Laws of the Universe, escribe[4]:
Aunque la forma de ver la geometría de Euclides era bastante diferente de la forma en que la miramos hoy, sus primeros cuatro postulados básicamente resumieron nuestra noción actual de un espacio métrico (bidimensional) con homogeneidad e isotropía completas, e infinito en extensión. De hecho, tal imagen parece estar muy de acuerdo con la naturaleza espacial a gran escala del universo real, según la cosmología moderna.
El quinto postulado, conocido como el postulado paralelo, ha llamado mucho la atención desde la época de Euclides. Esto se debe al hecho de que el postulado paralelo no parece ser evidente. Por lo tanto, muchos matemáticos a lo largo de los siglos han tratado de proporcionar una prueba de ello, mediante el uso de los primeros cuatro postulados. Aunque se han presentado varias pruebas, tarde o temprano se descubrió un error en todas y cada una de ellas. La razón de esto fue que todas las pruebas estaban haciendo uso de algún enunciado que parecía ser obvio o evidente pero luego resultó ser equivalente al postulado paralelo en sí. La independencia del postulado paralelo de los otros axiomas de Euclides fue resuelta en 1868 por Eugenio Beltrami (1836–1900[5]). En examen minucioso de la axiomática de Euclides desde el punto de vista formalista culminó a principios del siglo XX, en el trabajo seminal de David Hilbert (1862-1943), que influyó en gran parte del trabajo posterior en Principios Matemáticos[6]. Sin embargo, ve a Elementos como una base formalista incompleta para las Matemáticas de su tiempo, es solo una vista parcial a posteriori. Seguramente, un epigrama mortal lleno de respeto, pero no una explicación convincente del hecho de que son una fuente permanente de nueva inspiración, tanto en la investigación fundamental como en la matemática funcional.
No es casualidad que uno de los principales matemáticos del siglo XX, G.H. Hardy, en su famosa Apología de un matemático, toma sus dos ejemplos de Matemáticas importantes que siempre serán "frescas" y "significativas" de los Elementos. Además, el eminente lógico y combinadorista D. Tamari (1911– 2006) insistió en el hecho de que Euclides fue el primer pensador en exponer una teoría científica bien organizada sin mencionar o utilizar factores extralógicos[7]. Por lo tanto, según D. Tamari, Euclides debe ser considerado como el fundador de la forma moderna de ver los asuntos científicos[8].
Un tema de gran interés para la resolución de problemas en la Geometría Euclidiana es la determinación de un punto mediante el uso de transformaciones geométricas: traslación, simetría, homotetería e inversión. El conocimiento de las transformaciones geométricas nos permite comprender el comportamiento geométrico de las figuras planas producidas por ellas.
Algunos hechos básicos
1. Para crear una figura geométrica, es suficiente tener un punto y una forma matemática clara (ver Fig. 1.1) en la que el punto se mueve en el plano para producir esta forma. Entonces podemos decir que el punto atraviesa la forma plana.
2. Dos puntos del plano que se mueven en el plano de la misma manera matemática, atraviesan las mismas formas planas o iguales.
3. Una correspondencia biyectiva (mapeo biyectivo) se define entre dos formas si existe una ley que a cada punto de una forma corresponde uno y solo un punto de la otra forma, y viceversa.
Las formas se llaman correspondientes si entre dos formas iguales, siempre hay una correspondencia biyectiva. Lo contrario no siempre es cierto. Por ejemplo, vea la Fig. 1.2. Está claro que la forma más fácil de establecer una transformación biyectiva entre el segmento de línea recta AB y el segmento de línea torcida KLM, donde A, B son las proyecciones de K, M en AB, respectivamente, es considerar la proyección de cada punto de KLM al punto correspondiente de AB.
 16.36.17.png)
Fig. 1.1 Intuitivo
 16.36.22.png)
Fig. 1.2 Intuitivo
La proyección es única porque desde cada punto del plano existe una línea única perpendicular a AB. Si  , entonces la semicircunferencia con el centro O y el diámetro AB, con A, B excluido, puede coincidir con l de la siguiente manera: desde el punto O, consideramos las medias líneas Ox (ver Fig. 1.3 y Fig. 1.4).
, entonces la semicircunferencia con el centro O y el diámetro AB, con A, B excluido, puede coincidir con l de la siguiente manera: desde el punto O, consideramos las medias líneas Ox (ver Fig. 1.3 y Fig. 1.4).
Luego, a cada punto de intersección M de Ox con la semi-circunferencia, se puede seleccionar el punto único N, que es la intersección de l con Ox, y viceversa.
Observación. Diremos que dos formas correspondientes se atraviesan de manera similar si durante su recorrido sus puntos se atraviesan en el mismo orden.
• Una circunferencia
(i) se atraviesa en la dirección positiva si un punto "en movimiento" lo atraviesa en sentido antihorario.
(ii) se atraviesa en la dirección negativa si un punto "en movimiento" lo atraviesa en sentido horario.
Pensamos que el reloj yace en el mismo plano que nuestra forma (ver Fig. 1.1).
Ahora suponga que tenemos dos formas congruentes. Entonces podemos construir una correspondencia entre sus puntos de la siguiente manera:
 16.47.56.png)
y supongamos que desde sus vértices A1, B1 dos puntos comienzan a moverse a la misma velocidad, atravesando sus respectivas circunferencias. Luego, en un punto dado en el tiempo t0, los puntos han cubierto caminos iguales.
1.2 Traslación
 16.44.54.png)
Fig. 1.3; Fig. 1.4, Fig. 1.5 Traslación
Las traslaciones pueden entenderse como movimientos directos sin cambios de orientación, es decir, mantienen la forma y el tamaño de las figuras u objetos trasladados, a las cuales deslizan según el vector de desplazamiento.
- La figura trasladada es idéntica a la figura inicial.
- La figura trasladada conserva la orientación que la figura original.
Se dice que dos traslaciones son consecutivas si la primera traduce la forma S a la forma S1 y el segundo traduce S1 a la forma S2.
Dos traslaciones consecutivas definidas por vectores de diferentes direcciones se pueden reemplazar por una traducción, que se define por un vector que es la suma vectorial de los otros dos vectores.
Es fácil, observar lo siguiente:
(i) La traslación de una forma se puede reemplazar por otras dos traslaciones consecutivas.
(ii) Lo anterior también es válido para más de dos traslaciones consecutivas.
(iii) La resultante de las dos traslaciones es la traslación que las reemplaza.
(iv) La posición final de una forma, cuando es el resultado de varias traslaciones, es independiente del orden en que se realizan las traslaciones.
1.3 Simetría
El empleo de la palabra simetría se utiliza en el sentido cotidiano en dos maneras. En el sentido simétrico algo así como bien proporcionado, equilibrado, y, esto refiere un tipo de concordancia de varias partes por las que se integra un todo. En otro sentido, la idea armonía, esta no se limita de ninguna manera a los objetos espaciales; el sinónimo “armonía” apunta más hacia la acústica y la geometría de la música en su poética. La simetría griega, el punto medio hacia el cual el virtuoso debe esforzarse en sus acciones de acuerdo a la ética de Aristóteles, un estado de ánimo que está igualmente alejado de los extremos emocionales.
La imagen del balance proviene de una conexión natural con el segundo sentido en el que la palabra simetría se utiliza en los tiempos modernos: la simetría bilateral; la simetría izquierda y derecha, que son tan vivibles en la estructura de los animales superiores, especialmente en el cuerpo humano. Ahora bien, esta simetría bilateral es estrictamente geométrica a diferencia de la vaga noción de simetría cotidiana con un concepto absolutamente impreciso. Un cuerpo, una configuración espacial, es simétrico con respecto a un plano E dado si se lleva a sí mismo por reflexión en E. Tome cualquier línea l perpendicular a E y cualquier punto p en l: existe un y solo un punto p’ en l que tiene la misma distancia de E pero se encuentra en el otro lado del plano. El punto p’ coincide con p sí y solo si p está en E. La reflexión en E es que el mapeo del espacio sobre sí mismo, S:  , que incluye el punto arbitrario p en esta imagen del espejo p’ con respecto a E. Una asignación se define siempre que se establece una regla mediante la cual cada punto p está asociado a una imagen p’.
, que incluye el punto arbitrario p en esta imagen del espejo p’ con respecto a E. Una asignación se define siempre que se establece una regla mediante la cual cada punto p está asociado a una imagen p’.
Otro ejemplo, una rotación alrededor de un eje perpendicular, por ejemplo de 30º, lleva cada p del punto del espacio a un punto p’ y define así una rotación alrededor de un eje l si se tiene simetría rotacional alrededor de un eje l si se lleva a sí misma por todas las rotaciones alrededor de l. La simetría bilateral aparece así como el primer caso de un concepto geométrico de simetría que se refiere a operaciones tales como reflexiones o rotaciones. Debido a su simetría rotacional completa, el círculo en el plano, la esfera en el espacio fueron consideradas por los pitagóricos las figuras geométricas más perfectas y Aristóteles atribuyó forma esférica a los cuerpos celestes porque cualquier otro restaría su perfección celeste.
En esta tradición un poeta moderno, David Being expresó como “tu gran simetría[9]”:
Dios, tu gran simetría,
que puso un poco de lujuria en mi
de donde mis penas primavera,
por todo los días desánimos
que he pasado de maneras sin forma
dame una cosa perfecta.
La simetría, tan ancha o tan estrecha como se puede definir su significado, es una una idea por la cual el hombre a través de los siglos ha tratado de comprender y crear orden, belleza y perfección. Mientras estamos a punto de pasar del arte a la naturaleza, esperamos primero considerar lo que suele llamarse filosofía matemática de izquierda y derecha[10]. En el espacio la distinción de izquierda y derecha se refiere a la orientación de un tornillo. Si hablas de girar a la izquierda quieres decir que el sentido en el que giras combinando con la dirección hacia arriba desde el pie hasta la cabeza de tu cuerpo forma un tornillo izquierdo. La rotación diaria de la tierra junto con la dirección de su eje de Sur a polo Norte es un tornillo izquierdo, es un tornillo derecho si se le da al eje la dirección opuesta. Hay ciertas sustancias cristalinas llamadas ópticamente activas que traicionan la asimetría interna de su constitución girando el plano de polarización de la luz enviada a través de ellas a la izquierda o a la derecha; por esto, por supuesto, queremos decir que el sentido en que el plano gira mientras la luz viaja en una dirección definida, combinando con esa dirección, forma un tornillo izquierdo (o uno derecho según sea el caso). Por lo tanto, cuando dijimos anteriormente y ahora repetir en una terminología debida a Leibniz, que izquierda y derecha son indiscernibles, queremos expresar que la estructura interna del espacio no nos permite, salvo por elección arbitraria, distinguir una izquierda de un tornillo derecho.
 18.54.24.png)
Fig. 1.6 Relatividad
Deseamos hacer esta noción fundamental aún más precisa, ya que depende de toda la teoría de la relatividad, que no es más que otro aspecto de la simetría. Según Euclides, se puede describir la estructura del espacio por una serie de relaciones básicas entre puntos, como ABC se encuentran en la línea recta, ABCD están en el plano, AB es congruente con CD (Figura 1.6). Tal vez la mejor manera de describir la estructura del espacio es la que adoptó Helmholtz[11]: por la noción única de congruencia de figuras. Un mapeado S del espacio se asocia a cada punto p un punto ![]() . Un par de asignaciones S,
. Un par de asignaciones S, ![]() ,
, ![]() , de las cuales una es la inversa de la otra, de modo que si S conduce a p en p’ entonces S’ lleva p’ de vuelta en p y viceversa, se habla de como un par de asignaciones o transformaciones uno a uno.
, de las cuales una es la inversa de la otra, de modo que si S conduce a p en p’ entonces S’ lleva p’ de vuelta en p y viceversa, se habla de como un par de asignaciones o transformaciones uno a uno.
Una transformación que preserva la estructura del espacio y, si definimos esta estructura a la manera de Helmholtz, eso significaría que lleva dos figuras congruentes, es llamado automorfismo por los matemáticos. Leibniz reconoció que esta es la idea subyacente al concepto geométrico de similitud. Un automorfismo lleva una figura en una que es en las palabras de Leibniz “indiscernible de ella si cada una de las dos figuras se considera por sí misma”. Lo que queremos decir entonces al afirmar que la izquierda o la derecha son de la misma esencia es el hecho de que la reflexión en un plano usa automorfismo, que sugiere simetría.
El espacio como tal es estudiado por la geometría. Pero el espacio es también el medio de todas las ocurrencias físicas. La estructura de la física del mundo es revelada por las leyes generales de la naturaleza. Están formuladas en términos de ciertas cantidades básicas que son funciones en el espacio y el tiempo. Ernst Mach habla de la conmoción intelectual que recibió cuando se enteró de que una aguja de brújula magnética se desvía en cierto sentido, a la izquierda o a la derecha, si se suspende paralelamente a un cable de cobre a través del cual pasa una corriente eléctrica en una dirección definida. Dado que toda la configuración geométrica y física, incluyendo la corriente eléctrica y los polos sur y norte de la aguja magnética, a todas las apariencias, son simétricas con respecto al plano E colocado a través del alambre y la aguja, la aguja debe reaccionar entre izquierda o derecha. Pero las apariencias a veces son son engañosas. El dilema Mach en su niñez, fue el resultado de una suposición demasiado apresurada sobre el efecto de la reflexión en E sobre la corriente eléctrica y los polos magnéticos positivos y negativos de la aguja: si bien sabemos a priori cómo las entidades geométricas se encuentran bajo reflexión, tenemos que aprender de la naturaleza cómo se comportan las cantidades físicas.
Y esto es lo encontramos: bajo la reflexión en el plano E la corriente eléctrica conserva su dirección, pero los polos magnéticos sur y norte se intercambian. Por supuesto, esta salida, restablece la equivalencia de izquierda y derecha, solo es posible debido a la igualdad esencial de magnetismo positivo y negativo. Todas las dudas se disiparon cuando se descubrió que el magnetismo de la aguja tiene su origen en corrientes eléctricas moleculares que circulan alrededor de la dirección de la aguja, está claro que bajo la reflexión en el plano E tales corrientes cambian el sentido en el que fluyen.
El resultado neto es que en toda la física no ha aparecido nada que indique una diferencia intrínseca de izquierda y derecha. Así como todos los puntos y todas las direcciones en el espacio son equivalentes también lo son izquierda y derecha. Posición, dirección, izquierda y derecha son conceptos relativos.
En la ciencia, la creencia en la equivalencia de izquierda y derecha se ha mantenido incluso frente a ciertos hechos biológicos que actualmente se mencionan que parecen sugerir su inequivalencia aún más fuerte que la desviación de la aguja magnética que conmocionó a Mach. El mismo problema de equivalencia surge con respecto al paso del tiempo y al futuro, que se intercambian invirtiendo el sentido del tiempo y en la electricidad la polaridad positiva o negativa.
Este paseo semi-filosófico era necesario como fondo para la discusión de la simetría izquierda y derecha en la naturaleza; teníamos que entender que la organización general de la naturaleza posee esa simetría. Pero uno no esperará que ningún objeto especial de la naturaleza lo muestre a la perfección. Aun así, es sorprendente hasta que punto prevalece. Debe haber una razón para ello y no está lejos: es probable que un estado de equilibrio sea simétrico. Más precisamente, en condiciones que determinan un estado único de equilibrio, la simetría de las condiciones debe trasladarse al estado de equilibrio. Por lo tanto, la pelota de tenis y las estrellas son esferas; la Tierra también sería una esfera si no girara alrededor de su eje. La rotación aplana los polos, pero se conserva la simetría rotacional o cilíndrica alrededor de su eje. La característica que necesita explicación no es, por lo tanto, la simetría rotacional de su forma, sino las desviaciones de esta simetría que se muestra en la distribución irregular del agua (las mareas).
Si toda la naturaleza fuera en plenitud determinista en sus fenómenos, todo compartiría las leyes universales formuladas por la teoría de la relatividad. El mero hecho de que esto no sea así demuestra que la contingencia es una característica cuántica esencial del mundo de la incertidumbre, en otras palabras existe la condición de no simetría en la realidad material. Leibniz y su principio de la razón suficiente, en el que expresa que todo, absolutamente todo lo puede conocer la razón; a menudo creemos que Leibniz imaginó en la mera voluntad de Dios que creó una realidad simétrica en su mecánica. La verdad tal como la vemos hoy es que las leyes de la naturaleza no determinan de manera única el único mundo que existe realmente, ni siquiera si se admite que dos mundos que surgen uno del otro por una transformación automórfica, es decir, por una transformación que preserva las leyes universales de la naturaleza, deben ser consideradas el mismo mundo. Expliquemos un poco más esta situación.
Si para una pizca de materia, la simetría general inherente a las leyes de la naturaleza está limitada por nada más que el accidente de su posición P, entonces asumirá la forma de una esfera alrededor del centro P. Por lo tanto, las formas más bajas de la realidad son más o menos esféricas. La dirección de la gravedad es un factor importante, estrechando el conjunto de operaciones de simetría de todas las rotaciones alrededor del centro P a todas las rotaciones alrededor de un eje.
1.3.1 Simetría con respecto a un centro
Deje que O y M sean dos puntos. El punto M’ se llama simétrico al punto M con respecto a O, si O es el punto medio del segmento MM’.
Deje que O sea un punto y S sea una forma. Decimos que la forma S’ es simétrica de S con respecto al centro O si para cada punto M de S, hay un punto M’ de S’ tal que O es el punto medio de MM’, y viceversa, si para cada punto M’ de S’ hay un punto M en S tal que O es el punto medio de MM’. Dos formas simétricas entre sí son iguales.
1.3.2 Simetría con respecto a un eje
Deje que l sea una línea recta y M sea un punto. Decimos que el punto M’ es simétrico a M con respecto a la línea recta l si la línea recta l es la bisectriz perpendicular de MM’.
Deje que l sea una línea recta y S sea una forma. La forma S’ es simétrica a S con respecto a l si para cada punto M de S hay un punto M’ de S’ eso es simétrico para M con respecto a l, y por el contrario, si para cada punto M’ de S’ hay un punto M en S tal que M es el punto simétrico de M’ con respecto a l.
Dos formas que son simétricas alrededor de un eje son iguales. En el caso de que la simétrica de cada punto M, con respecto a un eje l, de una forma S también se encuentre en S, decimos que la línea recta l es un eje de simetría de S.
1.4. Rotación
1. Un ángulo ![]() es una forma plana. Consideramos que está cubierto por el movimiento plano de un lado hacia el otro, mientras que el punto O permanece fijo. Esto define una orientación (automáticamente se puede definir la orientación opuesta), y de esta manera tenemos la sensación de un ángulo dirigido, como lo ilustran estas figuras:
es una forma plana. Consideramos que está cubierto por el movimiento plano de un lado hacia el otro, mientras que el punto O permanece fijo. Esto define una orientación (automáticamente se puede definir la orientación opuesta), y de esta manera tenemos la sensación de un ángulo dirigido, como lo ilustran estas figuras:
 11.59.44.png)
En particular, considere el plano del ángulo ![]() y un plano paralelo al mismo en el que se encuentran las flechas de un reloj. Consideramos el movimiento plano de Ox que comienza en Ox y termina en Oy. Si este movimiento es opuesto al movimiento de las flechas del reloj, entonces se considera que el ángulo está orientado positivamente. En el caso opuesto, se considera que el ángulo está orientado negativamente.
y un plano paralelo al mismo en el que se encuentran las flechas de un reloj. Consideramos el movimiento plano de Ox que comienza en Ox y termina en Oy. Si este movimiento es opuesto al movimiento de las flechas del reloj, entonces se considera que el ángulo está orientado positivamente. En el caso opuesto, se considera que el ángulo está orientado negativamente.
2. Sea p un plano y O un punto de p que se considerará como el centro de la rotación. Sea A un punto del plano y ![]() sea un ángulo orientado. Consideramos que el punto A’ con
sea un ángulo orientado. Consideramos que el punto A’ con
![]()
y
![]()
La correspondencia de A a A’ se llama rotación de A con centro O y ángulo θ. Los puntos A y A’ se llaman homólogos.
3. La rotación de la forma S con el centro O y ángulo θ es el conjunto de los puntos rotados de S con el centro O y el ángulo θ.
4. Dos formas tales que una se obtiene de la otra por una rotación alrededor de un punto O son iguales.
1.5 Homotecia
Se puede considerar a la homotecia una homología particular de eje impropio, con centro en el de homología. La homotecia es la deformación de una figura, a decir que se hace más grande o más chica, todo en base a un punto el cual se toma como referencia conocido como: "centro de la homotecia". Hablando específicamente el término -"homo"- se refiere a igualdad. La homotecia es una cosa proporcional como algo afín de una composición de una transformación lineal y una traslación, y por consiguiente conserva sus ángulos.
1.6 Inversión
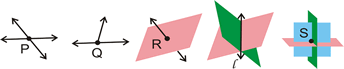
Una inversión en geometría es una reflexión con respecto a una circunferencia o a una esfera. Son similares a los casos de la reflexión ordinaria sobre una línea recta contenida en un plano o sobre un plano contenido en el espacio y tienen, así, las siguientes propiedades[12]:
a) Hay muchos puntos fijos: los puntos de la circunferencia/esfera donde se produce la reflexión.
b) Se preservan localmente los ángulos de incidencia entre líneas (especialmente, los ángulos rectos).
c) Las reflexiones siempre son involuciones, es decir, devuelven la forma original cuando se aplican sobre la imagen de una inversión previa.
Sin embargo, presentan diferencias significativas:
1) Una inversión generalmente asigna una línea recta a un círculo. En consecuencia, no es una aplicación colineal
2) Una inversión no conserva las longitudes.
Las inversiones siempre han jugado un papel importante en la geometría. Las Imag1 inversas de cónicas y cuádricas en el espacio son curvas algebraicas de cuarto grado como máximo, con propiedades interesantes (véanse los ejemplos posteriores).
1.7 Definición en el espacio geométrico
El espacio geométrico es el conjunto de todos los puntos que se extienden en tres dimensiones.
1. Un punto es una ubicación exacta en el espacio. Describe una ubicación, pero no tiene dimensiones espaciales en la definición de Euclides. En cálculo infinitesimal un punto en tres dimensiones es ![]() .
.
2. Una línea tiene infinitos puntos que se extienden en ambas direcciones al infinito, es un objeto de una dimensión 1D en R1 solo longitud. Las líneas tienen dirección, ubicación y siempre son rectas y su longitud no tiene anchura.
3. Un plano es una superficie en R2 (2D, dos dimensiones longitud y anchura) que contiene infinitas líneas de intersección que se extienden por infinito en todas las direcciones.
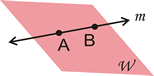
Podemos usar punto, línea y plano para definir nuevos términos.
4. Los puntos que se encuentran en la misma línea son colineales. P, Q, R, S y T son colineales porque están todos en la línea w. Si un punto U estuviera ubicado arriba o debajo de la línea w, sería no colineal.
![]()
5. Los puntos y/o líneas dentro del mismo plano son coplanarios.
6. Un punto final es un punto al final de un segmento de línea. Un segmento de línea o semirrecta es una porción de una línea con dos puntos finales. O bien, es una parte finita de una línea que se detiene en ambos extremos. Los segmentos de línea están etiquetados por sus puntos finales. El orden no importa.

 de A a B
de A a B
 de B a A
de B a A
7. Un segmento es parte de una recta. Comienza con un punto final y se extiende para infinito lejos del punto final en una dirección, perfectamente recta. Un segmento está etiquetado por su punto final y otro punto en la recta. Para las rectas, el orden sí importa, determina el sentido.
![]()
![]()
8. Una intersección es un punto o conjunto de puntos donde se superponen líneas, planos, segmentos o rayos.
1.7.1 Postulados
Un postulado es una regla básica de la geometría. Se supone que los postulados son verdaderos (en lugar de probados), al igual que las definiciones. La siguiente es una lista de algunos postulados básicos.
Postulado 1: dados dos puntos distintos, hay exactamente una línea (recta) que contiene esos dos puntos.
![]()
Postulado 2: Dados tres puntos no colineales, hay exactamente un plano que contiene esos tres puntos.
![]()
Postulado 3: Si una línea y un plano comparten dos puntos, entonces toda la línea se encuentra dentro del plano.
Postulado 4: Si dos líneas distintas se cruzan, la intersección será un punto.
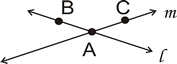
Las líneas l y m se intersecan en el punto A.
Postulado 5: Si dos planos distintos se cruzan, la intersección será una línea.

Al hacer dibujos geométricos, asegúrese de ser claro y etiquetar todos los puntos y líneas.
1.7.2 Propiedades del segmento de recta
La distancia es la medida de longitud entre dos puntos. Medir es determinar qué tan separados están dos objetos geométricos. La forma más común de medir la distancia es con una regla, donde x2 es el valor superior y x1 el valor inferior en el graduado de la recta, no existen distancias negativas:
![]()
Las reglas en metros generalmente se dividen en segmentos de centímetros.
Postulado de la regla. Tenga en cuenta que la distancia entre dos puntos es el valor absoluto de la diferencia entre los números que se muestran en la regla. Esto implica que no necesita comenzar a medir en "0", siempre y cuando reste el primer número del segundo.
 16.43.29.png)
Postulado de adición de segmentos. Si A, B y C son colineales y B está entre A y C, entonces: ![]() obedecen las reglas de la aritmética.
obedecen las reglas de la aritmética.
Notación del segmento de recta. Los puntos sobre una recta suelen ser letras mayúsculas, se denota a un segmento con la letra del punto inicial al punto final como se ilustra, donde la flecha indica el sentido:
 17.03.15.png)
Fórmula del punto medio
Al encontrar algo "a medio camino", está encontrando el punto medio de la línea recta que conecta los dos segmentos. El punto medio entre dos pares de coordenadas representa el punto medio, o el promedio. Es el par ordenado ![]() donde:
donde:
Segmento bisector. Un bisector corta un segmento de línea en dos partes congruentes y pasa a través del punto medio. Si la línea de corte es a 90º el bisector es perpendicular, para cada segmento de línea hay un bisector perpendicular.
1.8 Geometría euclidiana
Como es bien sabido, los Elementos de Euclides representaron durante siglos el mismo modelo de razonamiento científico y deductivo, y su difusión e influencia en Europa solo se correspondía con la Biblia y con algunos otros escritos de los Padres de la Iglesia. Fueron traducidos, editados y comentados cientos de veces, y estas ediciones y comentarios configuraron las herramientas científicas, los estándares metodológicos y el lenguaje matemático de muchos siglos. Los teoremas de Euclides se usaron para construir teorías matemáticas adicionales y más atrevidas, o se aplicaron en las ciencias físicas, mientras que la estructura deductiva de las pruebas fue estudiada por matemáticos, lógicos y epistemólogos como el ideal de la razón misma. En este sentido, los principios empleados como fundamentos y fundamentos de toda la construcción desempeñaron un papel histórico especial. Euclides había comenzado los Elementos con algunas suposiciones no comprobadas que debían otorgarse para establecer su gran sistema matemático. Sin embargo, desde la Antigüedad, el sistema de principios de Euclides ha sido discutido y cuestionado repetidamente: se encontraron algunas lagunas en las pruebas y se proporcionaron axiomas adicionales a los argumentos faltantes; otros principios euclidianos se demostraron a su vez a partir de declaraciones más elementales y, por lo tanto, se eliminaron de la lista de axiomas; aún otros fueron redactados de manera más simple, o cambiados para acomodar reparos filosóficos o para satisfacer consideraciones arquitectónicas; y se agregaron algunos más para extender los resultados geométricos más allá de los límites fijados por Euclides. Estos cambios en el sistema de principios que fundamentan las matemáticas elementales se encuentran entre los resultados más importantes de los estudios fundamentales llevados a cabo durante la Edad Moderna. Desde la Edad Media hasta principios del siglo XIX, cientos de ediciones diferentes de los Elementos proporcionaron sus propios principios para el mismo corpus de teoremas matemáticos; Si bien las declaraciones de las proposiciones euclidianas se mantuvieron más o menos iguales, y las pruebas en sí mismas rara vez se cambiaron, somos testigos, en este período, de una notable explosión de nuevos principios destinados a rigorizar, sistematizar y mejorar el trabajo de Euclides. La enorme creatividad de estos intentos fundacionales está atestiguada por la invención de unos 350 axiomas diferentes para las matemáticas elementales, y algunas obras emplean hasta cincuenta de ellos para fundamentar los teoremas de los Elementos (Euclides probablemente solo tenía diez principios). Muchos de estos nuevos axiomas tienen una gran importancia matemática e introdujeron en los fundamentos de las matemáticas varias ideas importantes a las que se les dio un desarrollo completo solo en los siglos XIX y XX. Se refieren a cuestiones de continuidad en el plano euclidiano, propiedades de incidencia en dos o tres dimensiones, cantidades arquimedesas y no arquimedesas, relaciones meológicas, congruencia y movimiento rígido, el postulado paralelo y la métrica euclidiana, o los primeros intentos de axiomatización de la aritmética. y álgebra. En este sentido, es muy importante destacar que los trabajos más conocidos sobre los fundamentos de las matemáticas producidos en la era moderna, como los trabajos de Dedekind, Frege y Peano sobre los principios de los números, o las famosas axiomatizaciones de Pasch, Pieri y Hilbert de la geometría, de ninguna manera representa el descubrimiento repentino de la necesidad de fundamentos rigurosos, sino que son los resultados tardíos y altamente perfeccionados de una larga tradición que se había desarrollado casi continuamente desde la época de Euclides en adelante. Incluso si puede ser difícil determinar con precisión una influencia directa ejercida por estos primeros programas modernos en, por ejemplo, Grundlagen der Geometrie de Hilbert, no cabe duda de que estos importantes trabajos matemáticos de los siglos anteriores afectaron indirectamente la investigación formal y moderna sobre la axiomática. . Sin embargo, no buscaré aquí la búsqueda de las fuentes de los estudios fundacionales del siglo XIX, ya que esto requeriría un enfoque completamente diferente. En cualquier caso, aunque el desarrollo de los fundamentos de las matemáticas en los últimos dos siglos ya se ha estudiado con cierta profundidad, la historia de la axiomática en el Renacimiento y la Edad Moderna aún se descuida en gran medida, y espero que el presente texto pueda representan un comienzo y una invitación a este rico campo.
La tradición euclidiana
Elementos de Euclides es una obra con muchas modificaciones que nos llegan hasta nuestro tiempo, entonces, ese desarrollo de la axiomática, que se encuentra en las ediciones de los Elementos, solo da una parte de toda la historia: y sin embargo, esta es (con mucho) la mayor parte, como las principales discusiones sobre los fundamentos de la geometría en la Edad Moderna temprana tuvo lugar en los comentarios euclidianos. Estudiemos algunos conceptos elementales.
La línea orientada. Un punto puede moverse en una línea l de dos maneras diferentes, desde un punto A a B, o desde un punto B a A.
 18.48.20.png)
Por lo tanto, podemos distinguir entre un sentido positivo en l (digamos A a B) y un sentido negativo (de B a A). Tal línea se dice que está orientada y se llama rayo. Siempre usaremos el término línea en el sentido de línea recta. En un rayo podemos diferenciar entre segmentos positivos y negativos y expresarlos enfrentar en forma aritmética como:
AB + BA= 0
Si P es un tercer punto en l, entonces siempre tenemos:
 18.53.19.png)
AB + BP + PA = 0
Independientemente de sí P se encuentra entre A y B o fuera de A y B.
En 1827 Möbius introduce el concepto de línea orientada, destacó una idea que estaba implícita en los trabajos de la época de Newton, asignaron valores positivos y negativos a la coordenada cartesiana x de un punto P en una línea l con respecto del origen fijo 0 en l. Cuando x se corre sobre ![]() nosotros podemos obtener todos los puntos en la línea y cada punto solo uno la vez. Aquí solo consideramos puntos reales, es decir, puntos de los cuales son coordenadas reales.
nosotros podemos obtener todos los puntos en la línea y cada punto solo uno la vez. Aquí solo consideramos puntos reales, es decir, puntos de los cuales son coordenadas reales.
Esta correspondencia uno a uno de puntos en una línea y números reales no es obvia. Para obtenerlo, tomemos un punto 0 en la línea l y otro punto U (un unitario) en l, y deje que 0 corresponda al número cero; y U a la unidad uno. Por método conocido de la recta numérica, podemos asociar un punto y un solo punto en l con cada número racional positivo y negativo. Cada intervalo de la l contiene tales puntos etiquetados por números, donde se pueden tomar tan pequeños como se quiera los a/b racionales. Los puntos son en todas partes densos solo quedan algunos huecos a/b irracionales. Si ahora postulamos que ![]() ,
, ![]() son fracciones decimales sin fin, entonces podemos combinar los números racionales e irracionales en orden ascendente al continuo aritmético. Luego postulamos que hay una correspondencia uno a uno entre los puntos de l y los números del continuo aritmético. Los puntos correspondientes a los números reales forman entonces un continuo geométrico. Aquí nos ocupamos de estos continuos.
son fracciones decimales sin fin, entonces podemos combinar los números racionales e irracionales en orden ascendente al continuo aritmético. Luego postulamos que hay una correspondencia uno a uno entre los puntos de l y los números del continuo aritmético. Los puntos correspondientes a los números reales forman entonces un continuo geométrico. Aquí nos ocupamos de estos continuos.
La sensación de aumento de x ahora se puede tomar como el sentido positivo en la línea l. Si indicamos con P(x) el punto P con la coordenada x, entonces tenemos para dos puntos P1(x1) y P2(x2) sobre l.
![]()
Cuatro puntos P1,P2,Q1,Q2 sobre l satisfacen la relación:
 21.20.34.png)
Que se deriva de la identidad algebraica de distancia:
 21.20.38.png)
Möbius extendió su idea a otras figuras. Por ejemplo, para un reloj en su desplazamiento de las agujas. Si uno de los triángulos formados en el reloj para dos puntos en la circunferencia y otro en el centro, podemos asignar siempre una área a. Por lo tanto, la longitud de un segmento ![]() se indicará siempre como
se indicará siempre como ![]() .
.
División de cocientes. Tomamos dos puntos fijos A(x=a) y B(x=b) en el rayo y también un punto variable arbitrario P(x), entonces llamamos
![]()
La relación de división de P con respecto de A y B. Esta relación de división para P fuera del segmento AB y negativa dentro de él. Es independiente de la orientación de la línea l. De la ecuación anterior encontramos que
![]()
Cada punto de la línea, excepto B, determina un valor de ![]() . Podemos incluir B si admitimos
. Podemos incluir B si admitimos ![]() con un valor infinito, pero en este caso estamos obligados a asignar a este punto valores
con un valor infinito, pero en este caso estamos obligados a asignar a este punto valores ![]() . Es geométricamente evidente que no hay dos puntos que tengan el mismo valor de
. Es geométricamente evidente que no hay dos puntos que tengan el mismo valor de ![]() . También vemos que cada valor de
. También vemos que cada valor de ![]() da un punto P(x) con la excepción de
da un punto P(x) con la excepción de ![]() , cuando x en
, cuando x en ![]() pierde su significado. Vemos que cuando P se aleja de A hacia la izquierda,
pierde su significado. Vemos que cuando P se aleja de A hacia la izquierda, ![]() crece de 0 a +1, acercándose +1 tan cerca como deseamos desde la parte inferior; y cuando P se aleja de B a la derecha, el valor de la
crece de 0 a +1, acercándose +1 tan cerca como deseamos desde la parte inferior; y cuando P se aleja de B a la derecha, el valor de la ![]() decrece desde
decrece desde ![]() , de nuevo acercándose a +1 tan cerca como queramos, esta vez desde la parte superior. Ahora introducimos un nuevo concepto diciendo que
, de nuevo acercándose a +1 tan cerca como queramos, esta vez desde la parte superior. Ahora introducimos un nuevo concepto diciendo que ![]() también pertenece un punto, el punto ideal o punto en el infinito P de la línea l. La coordenada x de
también pertenece un punto, el punto ideal o punto en el infinito P de la línea l. La coordenada x de ![]() es de
es de ![]() . En la figura siguiente podemos ver cómo un cambio continuo de
. En la figura siguiente podemos ver cómo un cambio continuo de ![]() para +1 vía 0 a
para +1 vía 0 a ![]() , y desde
, y desde ![]() corresponden a un movimiento continuo de P en la línea.
corresponden a un movimiento continuo de P en la línea.
 21.59.32.png)
No existe un término aceptado para nombrar los elementos en el infinito, excepto el término en el infinito en sí, que no siempre es adecuado. Usemos el término ideal versus ordinario. Podemos pensar que la línea se cierra al introducir ![]() ,
,
 22.03.49.png)
Los puntos A y B se denomina puntos básicos de l en la representación de los puntos P mediante cocientes de división. Podemos considerar como un nuevo tipo de coordenada de un punto en l. La relación de división fue introducida por Möbius en 1827 y más tarde este concepto se le llamó por D. E. Smith centro de gravedad en astronomía, donde se admiten masas positivas y negativas, para explicar la repulsión que expande nuestro universo[13].
Conjunto de armónicos. Se dice que cuatro puntos colineales son un conjunto armónico si existe un cuadrángulo completo, de modo que dos de los puntos sean puntos diagonales del cuadrángulo completo y los otros dos puntos estén en los lados opuestos determinados por el tercer punto diagonal. Dos puntos P1P2 sobre una línea l, para el cual la relación de división con respecto a A,B, es igual en valor absoluto pero diferente en signo, se llama armónico con respecto a A y B. P1 es el conjugado armónico de P2, y por viceversa. Nosotros decimos que los cuatro puntos son armónicos. La definición exige que, en esos puntos se de la relación.
 22.29.52.png)
![]()
Uno de los dos puntos P1,P2 deben estar dentro del segmento AB, el otro fuera del mismo, excepto cuando P1 coincide con A o B, en cuyo caso también coincide con P2. Cuando P1se encuentra en M, es decir a la mitad del camino entre A y B, P2 es idéntico a ![]() (
(![]() ). Cuando P1 se mueve de M a A, P2 se mueve de
). Cuando P1 se mueve de M a A, P2 se mueve de ![]() a A, cuando P1 se mueve de M a B, P2 se mueve de
a A, cuando P1 se mueve de M a B, P2 se mueve de ![]() a B. La propiedad armónica es obviamente independiente de la orientación de la linea l.
a B. La propiedad armónica es obviamente independiente de la orientación de la linea l.
Desde la ecuación se puede lanzar la forma:
![]()
![]()
Los puntos A y B son armónicos con respecto a P1 y P2, cuando P1 y P2 son armónicos con respecto a A y B.
Con el fin de construir el conjugado armónico P2 de un punto P1 con respecto de los puntos A y B, dibujamos:
 22.29.59.png)
A través de A y B dos líneas paralelas l1 y l2 en una dirección arbitraria diferente a l. Entonces, tomando el valor de la línea de ![]() y
y ![]() , obtenemos P2interesando la línea l con CD.
, obtenemos P2interesando la línea l con CD.
Teorema: Los bisectores interior y exterior del ángulo C de un triángulo CAB se cruzan en el lado opuesto AB en dos puntos P1 y P2 que son armónicos con respecto a A y B.
De esto se deriva inmediatamente de las dos relaciones, las longitudes de los segmentos:
![]()
El bisector de un ángulo de un triángulo interseca el lado opuesto en dos segmentos que tienen la misma relación que los adyacentes. Una relación similar se mantiene para el bisector del triángulo exterior.
Conclusión. Por lo tanto, una correspondencia elemental asigna un conjunto armónico de puntos/líneas a un conjunto armónico de líneas/puntos. Dado que una proyectividad es un producto finito de correspondencias elementales, una proyectividad asigna un conjunto armónico a otro conjunto armónico. Hemos demostrado que una relación armónica es invariable bajo una proyectividad como se indica en el teorema anterior.
Relación cruzada. En geometría, la relación cruzada, también llamada relación doble y relación anarmónica, es un número asociado con una lista de cuatro puntos colineales, particularmente puntos en una línea proyectiva. Dados cuatro puntos A, B, C y D en una línea, su relación cruzada se define como
 22.35.42.png)
donde una orientación de la línea determina el signo de cada distancia y la distancia se mide como se proyecta en el espacio euclidiano. (Si uno de los cuatro puntos es el punto de la línea en el infinito, las dos distancias que involucran ese punto se eliminan de la fórmula). El punto D es el conjugado armónico de C con respecto a A y B precisamente si la relación cruzada del cuádruple es -1, llamado cociente armónico. Por lo tanto, se puede considerar que la relación cruzada mide la desviación del cuádruple de esta relación; de ahí el nombre de relación anarmónica.
 22.44.05.png)
La relación cruzada se conserva mediante transformaciones fraccionales lineales. Es esencialmente la única invariante proyectiva de un cuádruple de puntos colineales; esto subraya su importancia para la geometría proyectiva. Si se fijan tres puntos, la relación transversal determina exclusivamente el cuarto punto.
Proyectividad. Considerar dos lineas l y l’. Los puntos P en l están determinados por su relación de división ![]() con respecto a dos puntos básicos A,B en l, los puntos P’ de forma similar por sus relaciones
con respecto a dos puntos básicos A,B en l, los puntos P’ de forma similar por sus relaciones ![]() , con respecto a A’,B’ en l’. Una relación bilineal entre
, con respecto a A’,B’ en l’. Una relación bilineal entre ![]() .
.
![]()
 17.56.40.png)
![]() son constantes, no todas ceros, determinadas una y solo una
son constantes, no todas ceros, determinadas una y solo una ![]() cuando
cuando ![]() se da, y una y solo una de ellas
se da, y una y solo una de ellas ![]() cuando
cuando ![]() se da, siempre los coeficientes no cumplen alguna condición especial que se descubre a continuación.
se da, siempre los coeficientes no cumplen alguna condición especial que se descubre a continuación.
![]()
Esta ecuación se llama bilineal, porque es lineal en el valor de ![]() y en el valor de
y en el valor de ![]() . Es la ecuación más genial de este tipo.
. Es la ecuación más genial de este tipo.
Esto significa que en este caso podemos asociarnos en cada punto P en l uno y solo un punto P’ en l’ y viceversa. Tal correspondencia uno a uno, expresa da por
![]() , es llamada una proyectividad sobre líneas, y los puntos forman un conjunto de puntos proyectivos.
, es llamada una proyectividad sobre líneas, y los puntos forman un conjunto de puntos proyectivos.
Cuando cuatro puntos en una línea corresponden a cuatro puntos en otra línea por medio de una proyectividad, entonces la relación cruzada de los cuatro puntos en la primera línea es igual a la de los cuatro puntos de la otra línea.
El teorema fundamental de la geometría proyectiva establece que tres pares de puntos correspondientes que determinan una proyectividad entre dos lápices de puntos. Una proyectividad asigna un conjunto armónico a un conjunto armónico, pero un conjunto armónico de puntos consta de cuatro puntos. Surgen varias preguntas.
¿Es la proyección de un conjunto armónico, también un conjunto armónico?
Es decir, ¿una relación armónica es invariable bajo una proyectividad?
¿Existe una proyectividad entre dos conjuntos armónicos?
Si un hombre conoce de inmediato la base geométrica de las cosas y su esplendor festivo, su poesía es exacta y su aritmética musical.
Ralph Waldo Emerson (1803–1882)
Una proyectividad es una involución si un par de puntos correspondientes están en involución. En el caso general de una involución, debe interpretarse que x y x’ sean intercambiables, esto significa que x y x’ en la ecuación da una involución en una línea.
1.9 Elementos imaginarios
La búsqueda de puntos dobles en las productividades elípticas ha dado lugar a ecuaciones cuadráticas con raíces imaginarias o complejas. Las coordenadas ahora no solo son valores reales. Esto cambia cuando cuando ampliamos el rango de números subyacentes a nuestra geometría desde el de los números reales hasta el de los números complejos. En este caso asignamos a cada número complejo un punto en la línea como coordenada. La línea ahora se convierte en una cantidad bidimensional que se puede introducir en una correspondencia uno a uno con el plano Gauss (plano complejo) en en el que estamos acostumbrados a representar números complejos z=x+iy por medio de puntos reales con coordenadas (x,y). Los puntos con coordenadas reales o puntos reales corresponden a los puntos del eje x del plano Gauss. El plano Gauss tiene la misma geometría que el plano euclidiano en lo que respecta a los puntos ordinarios. Hay una diferencia cuando se introducen elementos ideales.
Los puntos con valores imaginarios o complejos se denominan puntos imaginarios. La línea en la que se admiten puntos reales e imaginarios se llama línea geométrica compleja, en contraste con nuestra línea anterior, que era una línea en geometría real. En geometría compleja, todas las projectividades no singulares sobre una línea tienen dos puntos dobles, que pueden ser reales distintos o coincidentes o, imaginarios distintos.
La geometría analítica surgió del álgebra del siglo XVI como aplicación de la geometría griega. Por lo tanto, el rango subyacente de números era originalmente el de los números positivos. Pero los números positivos no forman un campo o cuerpo, lo que significa que aunque cumplen con las leyes ordinarias de la suma y la multiplicación, no satisfacen el requisito de que un a+x=b se puede resolver para todos a y b. Por lo tanto, las operaciones en geometría analítica fueron extendidas por Newton y otros a los números Reales, que forman un campo. Lo mismo sucedido después, y fue necesario para la geometría analítica extender los números a los complejos. Los elementos complejos entraron en la geometría con la discusión de las raíces de la ecuaciones cuadráticas por Monge y Poncelet. En este punto los imaginarios se introducen principalmente como auxiliares al estudio de elementos reales. El campo subyacente es aquí el de los complejos. Esto se encontró con cierta desconfianza al principio, hasta que se encontró que la geometría no necesita basarse en un campo numérico en particular, y esto amplió la construcción de otras álgebras subyacentes.
Aunque la geometría compleja fue aceptada gradualmente, su estudio sistemático tuvo que esperar tiempos recientes en manos de Cartan, Study, Fubini y Coolinge.
Podemos seleccionar otros campos numéricos para proporcionar el álgebra subyacente de una geometría. Se ha prestado especial atención a los campos finitos, que son campos con solo un conjunto finito de números, en aplicaciones de mecánica de códigos. Uno de estos campos es el conjunto de todo los enteros mod n (n un entero positivo), en el hay toda clase de cosas como hiperesferas, radios sobre una infinidad de dimisiones… pero dejamos esto hasta aquí, ya es hora de un breve estudio por el campo del espacio imaginario, cuyo campo complejo es una geometría fascinante.
1.9.1 El plano complejo
Los números reales ![]() incluyen a los racionales e irracionales, que corresponden a todos los puntos de una línea infinita llamada línea real. Parece indiscutible que el cuadrado de un número negativo es positivo, puesto que el cuadrado de un número real es no negativo, cumpliendo la ecuación
incluyen a los racionales e irracionales, que corresponden a todos los puntos de una línea infinita llamada línea real. Parece indiscutible que el cuadrado de un número negativo es positivo, puesto que el cuadrado de un número real es no negativo, cumpliendo la ecuación
![]()
Es Raphael Bombelli en 1526 quien introduce el número complejo, fue en su obra L’Algebra[14], donde se observa a simple vista que la ecuación anterior no tiene ninguna solución real (raíces). Sin embargo, Roger Penrose destaca que al superarse el parecer imposible, por un enfoque razonable que exige otro sistema de números que sea adecuado para tales propósitos, en que nos permita resolver la ecuación[15] ![]() . Para este caso la ecuación algebraica general de grado n, donde
. Para este caso la ecuación algebraica general de grado n, donde ![]() son números reales cualesquiera.
son números reales cualesquiera.
![]()
Este objetivo solo puede lograrse si conseguimos de alguna manera extender el sistema de números reales por otro que es parte, lo hacemos con un sistema de numeración de otro más extendido. ![]() es en cierto sentido la ecuación algebraica más simple sin raíces reales, un primer acercamiento evidente para nuestro problema es introducir una unidad imaginaria
es en cierto sentido la ecuación algebraica más simple sin raíces reales, un primer acercamiento evidente para nuestro problema es introducir una unidad imaginaria ![]() , es decir, una nueva dimensión y entonces el plano numérico se extiende al número complejo de la forma:
, es decir, una nueva dimensión y entonces el plano numérico se extiende al número complejo de la forma:
![]() ,
,
Donde a y b son números reales arbitrarios y la operación de estos números se define de manera natural como binomios ![]() donde x es desconocida, salvo en este caso:
donde x es desconocida, salvo en este caso:
![]()
Sí b=0, observamos que solo está presente la línea real con sus características especiales. Asombrosamente como veremos resulta que una vez que permitimos que x tome valores complejos, la ecuación general algebraica siempre tiene una raíz, aunque los coeficientes ![]() sean números complejos, un resultado que es conocido como el teorema fundamental del álgebra: establece que todo polinomio de grado mayor que cero tiene una raíz.
sean números complejos, un resultado que es conocido como el teorema fundamental del álgebra: establece que todo polinomio de grado mayor que cero tiene una raíz.
Por número complejo nos referimos a una expresión ![]() , donde a y b son números reales e “i” es la unidad o dimensión imaginaria. Si a es la parte real de c, escrita como Re c, b es llamada la parte imaginaria de c, escrita como Im c. El número complejo cero es
, donde a y b son números reales e “i” es la unidad o dimensión imaginaria. Si a es la parte real de c, escrita como Re c, b es llamada la parte imaginaria de c, escrita como Im c. El número complejo cero es ![]() , donde las partes imaginaria y real valen cero. Por definición dos números
, donde las partes imaginaria y real valen cero. Por definición dos números ![]() son iguales solo sí
son iguales solo sí
![]()
Si Im c=0, c=a+bi se reduce a un número real, mientras que ![]() , se dice que c es puramente imaginario. Los números complejos pueden ser representados geométricamente como puntos en el plano, un hecho que no solo es útil, sino prácticamente indispensable para la ingeniería y la aplicación científica moderna de este “mágico número”, como lo llama Roger Penrose. Con la introducción de un sistema de coordenadas rectangulares en el plano, podemos identificar el número complejo
, se dice que c es puramente imaginario. Los números complejos pueden ser representados geométricamente como puntos en el plano, un hecho que no solo es útil, sino prácticamente indispensable para la ingeniería y la aplicación científica moderna de este “mágico número”, como lo llama Roger Penrose. Con la introducción de un sistema de coordenadas rectangulares en el plano, podemos identificar el número complejo ![]() , como
, como![]() , asociado con el punto P.
, asociado con el punto P.
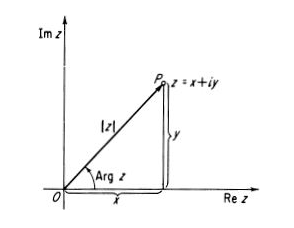
De esta manera, establecemos una correspondencia biunívoca entre el conjunto de todos los números complejos y el conjunto de todos los puntos en el plano con una precisión infinita dado que las partes Re y Im son números racionales e irracionales. Claramente, con esta asignación, el conjunto de todos números reales en el eje x y el conjunto de los números puramente imaginarios en el eje y, mientras que el conjunto de los números ![]() corresponden al plano complejo o llamado plano z, en el entendido que tal plano z es construido por términos
corresponden al plano complejo o llamado plano z, en el entendido que tal plano z es construido por términos ![]() que son los puntos que definen la densidad de la superficie z. Otra manera de representar al número complejo es usar el vector posición que une el origen con algún punto en el plano z. El vector
que son los puntos que definen la densidad de la superficie z. Otra manera de representar al número complejo es usar el vector posición que une el origen con algún punto en el plano z. El vector ![]() cuyo módulo o norma está dado por el valor absoluto del número complejo z, denotado por
cuyo módulo o norma está dado por el valor absoluto del número complejo z, denotado por ![]() . El ángulo de dirección entre el eje real y el vector
. El ángulo de dirección entre el eje real y el vector ![]() , es positivo solo si la rotación es en el sentido antihorario y negativo en el sentido contrario; se llama argumento del número complejo z y se denota por Arg z. En otras palabras
, es positivo solo si la rotación es en el sentido antihorario y negativo en el sentido contrario; se llama argumento del número complejo z y se denota por Arg z. En otras palabras ![]() son las coordenadas polares
son las coordenadas polares![]() [16] .
[16] .
![]()
Por lo tanto
![]()
Esta última forma es la que se llama forma trigonométrica de un número complejo z. Claramente Arg z, se define solo en un múltiplo entero de ![]() . Sin embargo, existe uno y solo un valor de Arg z, es decir de
. Sin embargo, existe uno y solo un valor de Arg z, es decir de ![]() , que satisface la desigualdad
, que satisface la desigualdad
![]()
![]()
donde n se extiende sobre los números enteros positivos y negativos incluyendo al cero.
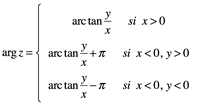
![]()
y
![]()
Se requiere algún cuidado en invertir la expresión de la tangente, puesto que el arco tangente de un número real x, es escrito como Arc tan x, y se define solo para múltiplos enteros de ![]() . Sin embargo, existe uno y solo un valor de Arc tan x, digamos un
. Sin embargo, existe uno y solo un valor de Arc tan x, digamos un ![]() que satisface la igualdad
que satisface la igualdad
![]()
y llamaremos al valor ![]() el valor principal del arco tangente de x, escrito arc tan x. Nosotros ahora podemos invertir la relación
el valor principal del arco tangente de x, escrito arc tan x. Nosotros ahora podemos invertir la relación ![]() , obteniéndose
, obteniéndose
Por otra parte, ![]() se convierte en infinito, claramente si tenemos
se convierte en infinito, claramente si tenemos
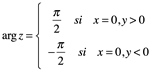
mientras que el caso z=0 es indeterminado como la versión Maya del cero.
Los números complejos
![]()
se dice son números complejos conjugados, si uno de estos se denota por z, y el otro se denota por ![]() o
o ![]() .
.
Obviamente los puntos z y ![]() son simétricos con respecto al eje real x.
son simétricos con respecto al eje real x.
![]()
![]()
Por otra parte
![]()
A menos que z sea un número con la parte real negativa, en cuyo caso
![]()
La ecuación de Euler o llamada por otros, identidad de Euler
![]()
donde i es la unidad imaginaria. Tenga en cuenta que la identidad de Euler es poliédrica y a veces también se llama la fórmula sobre una curvatura Euler. La expresión equivalente:
![]()
previamente había sido publicada por Costas (1714). El caso especial de la fórmula con ![]() da la identidad:
da la identidad:
![]()
Una ecuación que conecta los números fundamentales, ![]() , e, 1 y 0 (cero), las operaciones fundamentales +, ×, y exponenciales, la relación más importante =, y nada más. Gauss comentó que esta fórmula no era inmediatamente obvia.
, e, 1 y 0 (cero), las operaciones fundamentales +, ×, y exponenciales, la relación más importante =, y nada más. Gauss comentó que esta fórmula no era inmediatamente obvia.
La fórmula de Euler se puede demostrar utilizando un desarrollo de series
También se puede demostrar utilizando la integral compleja
Aplicando a ambos miembros de la igualdad la exponencial

![]()
Donde r representa la magnitud de z y es el argumento de z, usualmente llamado arg z.
![]()
1.9.2 Potencias de complejos
Ejemplo 1. Determine el valor de ![]()
Sabemos que
Solución:
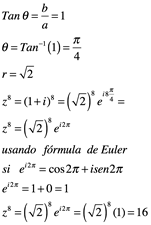
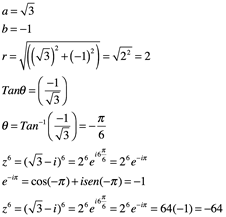
Ejemplo 2. Determine el valor de ![]()
Solución:
![]()
Ejercicio 1. Determine el valor de ![]() escribiendo el procedimiento
escribiendo el procedimiento
Solución:
![]()
La ecuación ![]() donde n es el valor complejo de raíces n-simas de la unidad, es decir, se dice “cada raíz tiene una magnitud de”. Ahora que:
donde n es el valor complejo de raíces n-simas de la unidad, es decir, se dice “cada raíz tiene una magnitud de”. Ahora que:
![]()
Usando la ecuación de Euler:
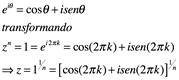
Ahora nosotros usamos la fórmula e De Moivre que establece:
![]()
Así que
![]()
Donde k es cualquier número entero. Ahora está claro que todas las n raíces de z deben estar en un círculo de radio 1, y las expresiones del tipo ![]() son típicamente de la forma:
son típicamente de la forma:
![]()
Pero en este caso r=1, por lo tanto
![]()
1.9.3 Álgebra compleja
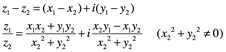
Se deduce de su tratamiento como binomiales, suma y producto de dos complejos
![]()
están dados por
![]()
Álgebra compleja es un campo para el que se cumplen las propiedades axiomáticas de toda álgebra, dados los números complejos ![]() ,
, ![]() ,
, ![]()
Conmutativa bajo +
![]()
Conmutativa bajo ![]()
![]()
Asociativa bajo +
![]()
Asociativa bajo ![]()
![]()
Distributiva bajo la +
![]()
Distributiva bajo la ![]()
![]()
Elemento neutro bajo la +
![]()
Elemento neutro bajo la ![]()
![]()
Inverso simétrico
![]()
![]()
![]()
Hasta lo visto aquí, uno podría representar a los números complejos como pares ordenados (sin emplear la unidad imaginaria i)
![]()
donde ![]() son números reales, entonces multiplicación y adición pueden ser representadas
son números reales, entonces multiplicación y adición pueden ser representadas
![]()
Con este enfoque, la relación ![]() tiene como análogo
tiene como análogo
![]()
Hemos visto que la explicación de la extensión de los números reales a los números complejos no es menos exquisita que la extensión de los números enteros a los racionales y su posterior extensión de los racionales a los irracionales implicados en el concepto de una línea continua.
¿Qué ocurriría si en lugar de utilizar números complejos ordinarios, utilizamos números complejos que anticonmutan? Es cuando se crean los Números de Grassmann ![]() , son números anticonmutativos, es decir, la suma de la conmutación de dos números de Graassmann se hace cero
, son números anticonmutativos, es decir, la suma de la conmutación de dos números de Graassmann se hace cero
![]()
![]()
Y en particular i=j
![]()
Así que el cuadrado de cualquier número de Grassmann es cero ![]()
Con esta propiedad podemos hacer expansiones de funciones que dependen de estos extraños números anticonmutativos. Si consideramos una función de dos variables Grassmann llamada ![]() .
.
Recordamos que para una función de dos variables, la fórmula de Taylor se expresa
![]()
Si hacemos la expansión de nuestra función f en serie de potencias que depende de variables de Grassmann, entonces
![]()
![]()
Las cantidades son números ordinarios. La expansión se detiene en el término cuadrático cruzado debido a la propiedad fundamental ![]()
Y la segunda línea se obtiene por anticonmutación.
1.10 La geometría y sus fundamentos
Las geometrías euclidianas y otras, se distinguen por las transformaciones que conservan sus propiedades esenciales. Utilizando el álgebra lineal y los grupos de transformación, son legibles de cómo estas geometrías clásicas se diferencian y se conectan. Las geometrías proyectivas e inversas para construir geometrías lineales y circulares, incluyen espacios métricos reales como euclidianos, hiperbólicos, elípticos y esféricos, así como sus contrapartes unitarias.
La invención de las coordenadas se atribuye a Pierre de Fermat (1601-1665), y a René Descartes (1596-1650), unieron lo que se había visto como los reinos separados de la geometría y el álgebra. Las conexiones aún más profundas fueron reveladas por el desarrollo posterior de nuevos tipos de geometría y la sistematización del álgebra. Antes de proceder a examinar algunas de esas conexiones, será útil establecer algunos hechos básicos sobre la geometría y los sistemas algebraicos.
1.10.1 La geometría euclidiana y otras geométricas
La obra "Elementos" de Euclides se ocupa de puntos, líneas y planos, además de propiedades de figuras geométricas como triángulos, círculos y esferas. Entre los conceptos fundamentales de la geometría del plano euclidiano se encuentran la colinealidad, la congruencia, la perpendicularidad y el paralelismo. Un tratamiento riguroso también implica relaciones de orden y continuidad no tratadas explícitamente en Elementos. Al omitir o modificar algunos de estos conceptos, se puede construir una variedad de otras geometrías: los planos afín son proyectivos reales, la esfera inversa real y las llamadas geometrías no euclidianas. Todos estos sistemas alternativos tienen extensiones a espacios de dimensiones más altas.
Dos puntos en el plano euclidiano ![]() están unidos por una línea única y la línea es de extensión infinita. Distancias y áreas pueden medirse con una unidad de longitud elegida arbitrariamente. Los ángulos rectos proporcionan un estándar para la medida angular. El postulado euclidiano es equivalente a la afirmación de que a través de cualquier punto que no esté en una línea dada, se puede dibujar solo una línea que no la interseca (los otros postulados implican la existencia de al menos una de esas líneas). De estas suposiciones se deduce, que la suma de los ángulos interiores de cada triángulo es igual a dos ángulos rectos y que el área del cuadrado en la hipotenusa de un triángulo recto, es igual a la suma de las áreas de los cuadrados en los dos lados.
están unidos por una línea única y la línea es de extensión infinita. Distancias y áreas pueden medirse con una unidad de longitud elegida arbitrariamente. Los ángulos rectos proporcionan un estándar para la medida angular. El postulado euclidiano es equivalente a la afirmación de que a través de cualquier punto que no esté en una línea dada, se puede dibujar solo una línea que no la interseca (los otros postulados implican la existencia de al menos una de esas líneas). De estas suposiciones se deduce, que la suma de los ángulos interiores de cada triángulo es igual a dos ángulos rectos y que el área del cuadrado en la hipotenusa de un triángulo recto, es igual a la suma de las áreas de los cuadrados en los dos lados.
Plano afín, axiomas:
- Dos puntos distintos se encuentran en una única línea.
- Cada línea tiene al menos dos puntos.
- Dada cualquier línea y cualquier punto no perteneciente a la línea, existe una única línea que contiene al punto y no se corta con la línea dada (axioma de Playfair).
- Existen tres puntos no-colineares (puntos no situados en una sola línea).
 20.33.51.png)
En el plano afín real R2, es el plano euclidiano sin perpendicularidad. No hay forma de medir ángulos y, las distancias solo se pueden comparar para puntos en una línea o en líneas paralelas. Sin embargo, todavía se puede determinar las áreas. Para el tamaño, todos los triángulos son equivalentes, al igual que todos los paralelogramos; no existe tal cosa como un triángulo recto o cuadrado. Las cónicas solo se pueden distinguir como elipses, parábolas e hipérbolas, no hay círculos.
El plano proyectivo es el conjunto estudiado por la geometría proyectiva. Surge en geometría euclidiana al añadir a un plano un punto por cada familia de rectas paralelas (es decir, uno por cada par de direcciones opuestas). Los puntos así añadidos reciben el nombre de puntos en el infinito, y su introducción unifica simplifica mucho los enunciados de la geometría. Por ejemplo, la afirmación que dice que dos rectas de un plano se cortan en un único punto o son paralelas, en el plano proyectivo se enuncia: dos rectas siempre se cortan en un único punto.
La luz del objeto llega al ojo del observador, pasando por el plano del dibujo. La geometría proyectiva analiza esto matemáticamente, estudiando las propiedades de incidencia[17].
 20.42.29.png)
Las figuras geométricas, comúnmente se debe recurrir a conceptos fundamentales, tales como el de punto, recta, plano y espacio, que en sí mismas también se consideran figuras geométricas. A partir de ellas es posible obtener todas las figuras geométricas, mediante transformaciones y desplazamientos de sus componentes.
Al adoptar la convención de que todas las líneas afines paralelas en una dirección determinada se encuentran en un “punto en el infinito” único y que todos esos puntos se encuentran en una sola línea en el infinito, eliminamos el paralelismo. Cuando admitimos los nuevos puntos y la nueva línea en el pliegue con los mismos postulados y privilegios que todas las demás, tenemos el plano Proyectivo P2. Las incidencias ahora exhiben un principio de dualidad: los dos puntos se unen con una línea única y, las dos líneas se encuentran en un punto único. La medida angular, la distancia y el área son identificadas. No todos los cuadriláteros son iguales y solo hay un tipo de cónico no degenerado. La congruencia, la perpendicularidad y el paralelismo han desaparecido, solo queda la noción de colinealidad.
Alternativamente, el plano euclidiano puede recibir la topología de una esfera mediante un único punto excepcional común a todas las líneas. Una línea puede entonces ser considerada como una especie de círculo. Las líneas extendidas y los círculos ordinarios juntos forman un conjunto de círculos inversivos en la esfera inversa real I2. Cualesquiera tres puntos que se encuentran en un círculo inversivo único; son concíclicos. Dos círculos pueden encontrarse en dos, uno o ningún punto real. La distancia entre dos puntos no se puede medir, pero el ángulo entre dos círculos intersectantes puede ser. Por lo tanto, la colinealidad ha sido reemplazada por la concíclica y la perpendicularidad sigue siendo significativa, pero la congruencia y el paralelismo han sido eliminados.
Aunque durante mucho tiempo se sospechaba de un teorema disfrazado, el postulado del paralelismo finalmente se demostró que era independiente de las otras suposiciones que rigen al plano euclidiano. Reemplazándolo con la hipótesis contraria, que a través de cualquier punto que no está en una línea dada hay más de una línea que no lo interseca; obtenemos el plano hiperbólico de Bolyai y Lobachevsky. Además, si no suponemos que las líneas son de longitud infinita, podemos construir una geometría métrica en la que no hay líneas no intersecantes: en el plano elíptico (el plano proyectivo con una métrica), las dos líneas se encuentran en un punto.
En la esfera elíptica (o simplemente la esfera), los puntos vienen en pares antípodos, y el papel de las líneas es jugado por grandes círculos; dos puntos no antipodales se encuentran en un gran círculo único, y dos grandes círculos cualesquiera se encuentran en un par de puntos antipodales. Cuando se identifican puntos antípodos, los grandes círculos de la esfera elíptica se convierten en líneas del plano elíptico (las dos geometrías a veces se les distingue como planos doble elípticos y único elíptico). Otra posibilidad es la esfera hiperbólica, que comprende dos hemisferios antípodos separados por un círculo ecuatorial de puntos autoantipodales. Dos grandes círculos se encuentran en un par de puntos antípodos, son tangentes a un punto ecuatorial o no se encuentran. La identificación de puntos antípodos convierte grandes círculos de la esfera hiperbólica en líneas del plano hiperbólico.
Los planos hiperbólicos, elípticos y esféricos elípticos constituyen las geometrías clásicas no euclidianas. Junto con la esfera hiperbólica, el plano euclidiano comparte la noción de colinealidad (o concíclica), congruencia y perpendicularidad. Una diferencia notable es que la suma de los ángulos interiores de un triángulo no euclidiano depende de su área, siendo proporcionalmente mayor que dos ángulos rectos para un triángulo elíptico (esférico) o proporcionalmente menor para uno hiperbólico. Aunque, cada geometría puede basarse en un conjunto seleccionado de postulados, un enfoque más instructivo caracteriza a las geometrías en grupos de transformación.
1.10.2 Un sistema algebraico
Un grupo es un conjunto no vacío G y una operación binaria ![]() , con
, con ![]() , satisfaciendo la ley asociativa
, satisfaciendo la ley asociativa ![]() ; tiene un elemento de identidad y para cada elemento tiene un inverso único. La operación de de grupo se toma comúnmente como multiplicación, como elemento identidad 1 y el inverso de a como
; tiene un elemento de identidad y para cada elemento tiene un inverso único. La operación de de grupo se toma comúnmente como multiplicación, como elemento identidad 1 y el inverso de a como ![]() . La ley conmutativa
. La ley conmutativa ![]() , puede o no sostenerse, se dice que el grupo es conmutativo, es un grupo abeliano. La notación aditiva se utiliza a veces para grupos abelianos, con la identidad denotada por cero 0 y al inversa de a como -a. El número de elementos de un grupo G es su orden
, puede o no sostenerse, se dice que el grupo es conmutativo, es un grupo abeliano. La notación aditiva se utiliza a veces para grupos abelianos, con la identidad denotada por cero 0 y al inversa de a como -a. El número de elementos de un grupo G es su orden ![]() . Ejemplos de estos grupos es la aritmética.
. Ejemplos de estos grupos es la aritmética.
Un subconjunto de un grupo G que es sí mismo un grupo con la misma operación es un subgrupo. Para cada elemento a de un grupo G (multiplicativo), el conjunto de todas las potencias integradas distintas de a forman un subgrupo abeliano ![]() ; el orden de
; el orden de ![]() es el periodo de a. El centro Z(G) es el subgrupo de elementos que conmutan con cada elemento de G.
es el periodo de a. El centro Z(G) es el subgrupo de elementos que conmutan con cada elemento de G.
Una transformación es una permutación de los elementos de un conjunto arbitrario (por ejemplo, todos los puntos de un espacio) o una asignación de un conjunto en otro. Todas las permutaciones de un conjunto determinado S forman un grupo simétrico sym(S), cualquier subgrupo del cual es un grupo de transformación que actúa sobre S. Una permutación de un conjunto finito es par o impar según se puede expresar como el producto de un número par o impar de transposiciones que intercambian dos elementos. El grupo simétrico en un conjunto con n elementos se denota por ![]() y tiene orden
y tiene orden ![]() . Para
. Para ![]() , las permutaciones uniformes constituyen un subgrupo de indice 2 en
, las permutaciones uniformes constituyen un subgrupo de indice 2 en ![]() , el grupo alternativo
, el grupo alternativo ![]() , de orden
, de orden ![]() .
.
Cuando a los puntos de una geometría se les asigna coordenadas adecuadas, cada transformación conserva las propiedades fundamentales de la geometría, se presenta mediante un tipo determinado de matriz invisible y los grupos de transformación corresponden a grupos multiplicativos de matrices. Las coordenadas y las entradas de matriz pueden ser números reales, o pueden pertenecer a sistemas numéricos más generales, por ejemplo, anillos. Si definimos un semigrupo como un conjunto no vacío con una operación binaria asociativa pero posiblemente carente de elemento de identidad o inversas, entonces un anillo R es un conjunto cuyos elementos forman tanto grupos abeliano aditivo como un semigrupo multiplicativo, satisfaciendo las leyes distributivas ![]() y
y ![]() . La identidad aditiva de R es cero y la identidad multiplicativa es la unidad. El anillo trivial 0 tiene solo un elemento.
. La identidad aditiva de R es cero y la identidad multiplicativa es la unidad. El anillo trivial 0 tiene solo un elemento.
Un anillo en el que la multiplicación es conmutativa es un anillo conmutativo. Un dominio integral es un anillo conmutativo no trivial con unidad sin divisores cero, es decir, de tal manera que ab=0 implica que a=0 o b=0. El dominio integral en el que cada ![]() elemento tiene un inverso
elemento tiene un inverso ![]() , por lo que los elementos distintos de cero forman un grupo multiplicativo, es un campo. Entre los sistemas de interés se encuentran el dominio integral de los
, por lo que los elementos distintos de cero forman un grupo multiplicativo, es un campo. Entre los sistemas de interés se encuentran el dominio integral de los ![]() enteros y los campos
enteros y los campos ![]() de racionales, reales y números complejos. Para cada primo o potencia de primo q hay un campo finito
de racionales, reales y números complejos. Para cada primo o potencia de primo q hay un campo finito ![]() con q elementos. Tales sistemas también llamados campos de Galois y denotados
con q elementos. Tales sistemas también llamados campos de Galois y denotados ![]() , fueron investigados por primera vez por Évariste Galois (1811-1832).
, fueron investigados por primera vez por Évariste Galois (1811-1832).
Una transformación T mapeado de los elemento de un grupo, anillo u otro sistema algebraico U, similar a un sistema V, es escrito como ![]() , es un homomorfismo si conserva la operación del sistema, llevando sumas o productos en el dominio U en sumas o productos en el codominio V. El kernel Ker T es el conjunto de elementos en U que se asignan al elemento de identidad de V (el elemento cero en el caso de un homomorfismo de anillo). La imagen (o rango) img T es el conjunto de elementos en U a los que se asignan los elementos del mapeo. Cuando los sistemas son grupos Ker T es un subgrupo normal de U y la img T es un subgrupo de V.
, es un homomorfismo si conserva la operación del sistema, llevando sumas o productos en el dominio U en sumas o productos en el codominio V. El kernel Ker T es el conjunto de elementos en U que se asignan al elemento de identidad de V (el elemento cero en el caso de un homomorfismo de anillo). La imagen (o rango) img T es el conjunto de elementos en U a los que se asignan los elementos del mapeo. Cuando los sistemas son grupos Ker T es un subgrupo normal de U y la img T es un subgrupo de V.
El mapeo ![]() es un monomorfismo o transformación “uno a uno” si Ker T contiene solo el elemento identidad de U; si es un epimorfismo o asignación transformación si img T es enteramente V. Un homomorfismo que nos lleva de U a V que es la vez uno a uno y tiene una inversa de asignación V a U también es un homomorfismo. Tal apero reversible se denominó isomorfismo y se escribe
es un monomorfismo o transformación “uno a uno” si Ker T contiene solo el elemento identidad de U; si es un epimorfismo o asignación transformación si img T es enteramente V. Un homomorfismo que nos lleva de U a V que es la vez uno a uno y tiene una inversa de asignación V a U también es un homomorfismo. Tal apero reversible se denominó isomorfismo y se escribe ![]() o , si U y V son el mismo sistema, se llama automorfirmo.
o , si U y V son el mismo sistema, se llama automorfirmo.
Cuando las tranformaciones de puntos geométricos se expresan como homomorfismos algebraicos, las operaciones sucesivas se llevan a cabo normalmente de izquierda a derecha.
1.10.3 Álgebra línea
De importancia primordial en el estudio de las geometrías y transformaciones son los espacios vectoriales V, grupos abelianos aditivos cuyos elementos “vectores” pueden multiplicarse por elementos de un campo escalar. El conjunto de vectores se cierra bajo esa multiplicación escalar , es decir, si un espacio vectorial sobre un campo F, entonces para todo escalar ![]() en F y todos los vectores x en V,
en F y todos los vectores x en V, ![]() también están en V.
también están en V.
Dado un conjunto ordenado de vectores ![]() en un espacio vectorial V, para cualquier conjunto ordenado de escolares
en un espacio vectorial V, para cualquier conjunto ordenado de escolares ![]() , el vector
, el vector ![]() es la combinación línea de los vectores. Si S es un subconjunto de V y si cada vector x en V puede expresarse como una combinación lineal de vectores en S, el conjunto S abarca V. Si una combinación lineal de vectores distintos
es la combinación línea de los vectores. Si S es un subconjunto de V y si cada vector x en V puede expresarse como una combinación lineal de vectores en S, el conjunto S abarca V. Si una combinación lineal de vectores distintos ![]() en un conjunto S es el vector cero, solo cuando todo los coeficientes escolares
en un conjunto S es el vector cero, solo cuando todo los coeficientes escolares ![]() son cero, los vectores en S son linealmente independientes. Si los vectores de un conjunto ordenado S que abarca un espacio vectorial V son linealmente independientes, S es una base para V y la expresión para cada x en V es única. Cada espacio vectorial tiene una base, y el número de vectores de base, llamado dimensión del espacio vectorial, es el mismo para cualquier base. El conjunto vacío es una base para el espacio vectorial de dimensión cero.
son cero, los vectores en S son linealmente independientes. Si los vectores de un conjunto ordenado S que abarca un espacio vectorial V son linealmente independientes, S es una base para V y la expresión para cada x en V es única. Cada espacio vectorial tiene una base, y el número de vectores de base, llamado dimensión del espacio vectorial, es el mismo para cualquier base. El conjunto vacío es una base para el espacio vectorial de dimensión cero.
Un homomorfismo del espacio vectorial, se da preservando sumas vectoriales y múltiplos escales, es una transformación lineal. Si un espacio vectorial sobre F, una transformación lineal ![]() es una forma lineal sobre V. En nuestro tratamiento, las coordenadas de puntos e hiperplanos funcionan como vectores renglón y vectores columna, y las operaciones geométricas son representadas por matrices, en forma algebraica como transformaciones lineales de coordenadas, están representadas por matrices. Las propiedades geométricas básicas, como las distancias y ángulos, se definen mediante formas bilineales, funciones
es una forma lineal sobre V. En nuestro tratamiento, las coordenadas de puntos e hiperplanos funcionan como vectores renglón y vectores columna, y las operaciones geométricas son representadas por matrices, en forma algebraica como transformaciones lineales de coordenadas, están representadas por matrices. Las propiedades geométricas básicas, como las distancias y ángulos, se definen mediante formas bilineales, funciones ![]() que mapean pares de vectores en escalares, preservando combinaciones lineales.
que mapean pares de vectores en escalares, preservando combinaciones lineales.
Muchos sistemas algebraicos se pueden dualizar. En particular, correspondientes a cada forma lineal en un espacio vectorial V es un covector de la dualidad espacio vectorial ![]() . El aniquilador de un vector
. El aniquilador de un vector ![]() es el conjunto de covectores
es el conjunto de covectores ![]() para los que la forma lineal correspondiente se asigna x a cero.
para los que la forma lineal correspondiente se asigna x a cero.
Un módulo tiene la estructura de un espacio vectorial, excepto que los escolares solo son necesarios para pertenecer a un anillo. Un álgebra A es módulo sobre un anillo R en el que también se define una multiplicación de elementos de módulo, distributivo sobre adición.
1.10.4 Análisis del espacio geométrico
La asignación de coordinadas establece una correspondencia entre los puntos de una línea geométrica y los elementos de algún sistema numérico. Cuando este sistema es un campo ordenado por ejemplo ![]() , los conjuntos de puntos colineales tienen un orden lineal o cíclico definido, que se puede describir siguiendo a Moritz Pasch (1843-1930) en términos de un punto que se encuentra entre otros dos o, después de Giovanni Vailati (1863-1909) un par de punto que separan otro par. La relación de orden de líneas, rayos y similares.
, los conjuntos de puntos colineales tienen un orden lineal o cíclico definido, que se puede describir siguiendo a Moritz Pasch (1843-1930) en términos de un punto que se encuentra entre otros dos o, después de Giovanni Vailati (1863-1909) un par de punto que separan otro par. La relación de orden de líneas, rayos y similares.
La propiedad que diferencia la geometría real y compleja de otras es la continuidad, lo que esencialmente significa que no hay puntos “perdidos” de una línea. La noción de continuidad está implícita en la teoría de la proporción desarrollada por Eudoxus y presentada en el libro V de Elementos de Euclides.
El algoritmo euclidiano se puede utilizar para probar el teorema fundamental de la aritmética: cada entero positivo se puede factorizar de forma única en el producto de las potencias de primos. Estas ideas se pueden extender a otros dominios de sistemas numéricos, pero no todos los sistemas permiten una versión del algoritmo euclidiano o tienen la propiedad de factorización única.
1.10.5 Transformación geométrica
Cada una de las geometrías descritas anteriormente tiene ciertos conjuntos de transformaciones que permutan los puntos conservando al mismo tiempo propiedades como la colinealidad y la congruencia. Todas las transformaciones que dejan una propiedad invariable en particular forman un grupo, y los grupos de transformación son relevantes para las diferentes geometrías.
Para que cada geometría considere a las coordenadas, se pueden asignar de modo que los puntos correspondan a vectores y, transformaciones geométricas a transformaciones lineales de un espacio vectorial. Las transformaciones lineales a su vez pueden ser representadas por matrices. Cuando los vectores de coordinadas ![]() se consideran filas en matrices (1xn matriz), una transformación lineal de A se considera por una matriz A nxn, mapea al punto x con coordinadas (x) y los grupos de transformación geométrica corresponden a grupos mutiplicativos de matrices. Como regla general, los grupos en cuestión resultan ser subgrupos del grupo lineal general de matrices invertibles o su grupo de consiente central, el grupo general proyectivo.
se consideran filas en matrices (1xn matriz), una transformación lineal de A se considera por una matriz A nxn, mapea al punto x con coordinadas (x) y los grupos de transformación geométrica corresponden a grupos mutiplicativos de matrices. Como regla general, los grupos en cuestión resultan ser subgrupos del grupo lineal general de matrices invertibles o su grupo de consiente central, el grupo general proyectivo.
1.10.6 El espacio en la geometría homogéneo
Esta geometría euclidiana es el prototipo de un espacio métrico real, en el que la distancia entre cualquier par de puntos es un número real no negativo, de modo que las longitudes y los ángulos se pueden medir de forma coherente con el espacio intuitivo. En un espacio homogéneo cualquier punto puede ser llevado a cualquier punto por una transformación que conserva la distancia o isometría. Los espacios euclidianos y otros espacios homogéneos se pueden distinguir por la forma en que se relacionan sus subespacios. Cada isometría puede expresarse como el producto de reflexiones de Imag1, un hecho que nos permite clasificar las diferentes isometrías del espacio de n dimensiones. La conjugación compleja permite definir una función de distancia de valor real en espacios coordinados sobre el campo complejo, y cada espacio métrico real tiene una contraparte unitaria.
1.10.6.1 Espacio métrico real
Los espacios métricos reales clásicos son lo que Reimann (1854) llamó “espacios de curvatura constante”. Para cada ![]() tenemos espacios esféricos, euclidianos, hiperbólicos y elípticos denotados respectivamente como
tenemos espacios esféricos, euclidianos, hiperbólicos y elípticos denotados respectivamente como ![]() . Para
. Para ![]() tales geometrías son n-variedad, espacios topológicos locales euclidianos; para
tales geometrías son n-variedad, espacios topológicos locales euclidianos; para ![]() los espacios
los espacios ![]() simplemente están conectados, cualquier dos puntos se puede vincular por un trazado y cada curva cerrada simple se puede encoger a un punto. Tener curvas constantes significa que cada uno de estos espacios es homogéneo (cualquier dos puntos que están relacionados por una transformación que preserva la distancia) e isotrópicos (todas las direcciones son iguales). Las diferentes geometrías pueden derivarse de espacios proyectivos, afines o inversivos. Aquí observamos algunas de sus propiedades distintivas.
simplemente están conectados, cualquier dos puntos se puede vincular por un trazado y cada curva cerrada simple se puede encoger a un punto. Tener curvas constantes significa que cada uno de estos espacios es homogéneo (cualquier dos puntos que están relacionados por una transformación que preserva la distancia) e isotrópicos (todas las direcciones son iguales). Las diferentes geometrías pueden derivarse de espacios proyectivos, afines o inversivos. Aquí observamos algunas de sus propiedades distintivas.
Cada espacio métrico real contiene varios subespacios subdimensionales inferiores. Un k-subespacio dimensional euclidiano, hiperbólico o elíptico ![]() ;
; ![]() es un espacio-k; un punto si k=0, una linea si k=1; un plano si k=2; un hiperplano si k=n-1. Un espacio esférico-k se puede incrustar en cualquier espacio métrico
es un espacio-k; un punto si k=0, una linea si k=1; un plano si k=2; un hiperplano si k=n-1. Un espacio esférico-k se puede incrustar en cualquier espacio métrico ![]() como un
como un
k-esfera ![]() ; un punto si k=0; un círculo si k=1; una esfera si k=2, una hiperesfera si k =n-1. Los puntos
; un punto si k=0; un círculo si k=1; una esfera si k=2, una hiperesfera si k =n-1. Los puntos ![]() ocurren en pares antipodales; una esfera k en
ocurren en pares antipodales; una esfera k en ![]() que contiene un par de este tipo es una gran esfera k, un subespacio k-dimensión de la esfera n-espacio. El conjunto vacío
que contiene un par de este tipo es una gran esfera k, un subespacio k-dimensión de la esfera n-espacio. El conjunto vacío ![]() puede considerarse como un subespacio universal de la dimensión -1.
puede considerarse como un subespacio universal de la dimensión -1.
Los subespacios de las diferentes geometrías están relacionados de diferentes maneras. Los puntos de ![]() se unen por una línea única y cualquier dos puntos no antipodales de
se unen por una línea única y cualquier dos puntos no antipodales de ![]() se encuentran en un gran círculo único. A los dos grandes círculos de una esfera
se encuentran en un gran círculo único. A los dos grandes círculos de una esfera ![]() intersecan en un solo punto; en cada caso, los grandes círculos o líneas tienen una perpendicularidad común única.
intersecan en un solo punto; en cada caso, los grandes círculos o líneas tienen una perpendicularidad común única.
 14.42.11.png)
Dos líneas en el plano euclidiano ![]() se intersecan o son paralelas en
se intersecan o son paralelas en ![]() , están en todas partes equidistantes.
, están en todas partes equidistantes.
 14.42.17.png)
En el plano hiperbólico ![]() , dos líneas no intersecantes son paralelas o divergentes (ultraparalelo). Las líneas paralelas en
, dos líneas no intersecantes son paralelas o divergentes (ultraparalelo). Las líneas paralelas en ![]() son asintóticas, convergiendo en una dirección
son asintóticas, convergiendo en una dirección
 14.42.21.png)
mientras que dos líneas divergentes tienen una perpendicularidad común única, lejos de la cual la distancia entre ellas aumenta sin límite.
 14.48.00.png)
A medida que su centro retrocede a lo largo de una línea dada, el límite de un círculo a través de un punto fijo en ![]() es una línea recta, pero en
es una línea recta, pero en ![]() el límite es una curva equidistante o pseudociclo de dos ramas. En
el límite es una curva equidistante o pseudociclo de dos ramas. En ![]() con k=2 el locus (lugar geométrico) es un círculo (o un punto). En
con k=2 el locus (lugar geométrico) es un círculo (o un punto). En ![]() el locus de puntos a una distancia constante de un gran círculo es un par de antípoda de pequeños círculos o puntos. Un locus es un conjunto de todos los puntos (comúnmente, una línea, un segmento de línea, una curva o una superficie), cuyos, satisface ubicación o es determinado por una o más condiciones especificadas.
el locus de puntos a una distancia constante de un gran círculo es un par de antípoda de pequeños círculos o puntos. Un locus es un conjunto de todos los puntos (comúnmente, una línea, un segmento de línea, una curva o una superficie), cuyos, satisface ubicación o es determinado por una o más condiciones especificadas.
Un estudiante de Gauss F.L. Wachter (1792-1817[18]) observó que, independientemente del postulado de paralelas, la geometría de una esfera cuyo radio aumenta sin límite se convierte en una euclidiana en el límite[19]. En el espacio euclidiano de n dimensiones el límite de una k-esfera ![]() para k<n es un k-plano
para k<n es un k-plano ![]() , mientras en un espacio hiperbólico de n dimensiones esta es un k-horosfera, isométrica en el espacio euclidiano k.
, mientras en un espacio hiperbólico de n dimensiones esta es un k-horosfera, isométrica en el espacio euclidiano k.
Una porción de un plano hiperbólico (un sector horocíclico) se puede incrustar en el espacio euclidiano de 3 dimensiones como una superficie pseudoesférica[20]. Aún así, ![]() puede sumergirse isométricamente en
puede sumergirse isométricamente en ![]() posibilidades con autointersecciones, si n es lo suficientemente grande, como cuando[21]
posibilidades con autointersecciones, si n es lo suficientemente grande, como cuando[21] ![]() .
.
El n-espacio ordinario euclidiano ![]() (
(![]() ) puede extenderse colindando con los puntos ordinarios de cada línea en un punto absoluto (o un punto en el infinito), es espacio euclidiano extendido resultante que se denota como
) puede extenderse colindando con los puntos ordinarios de cada línea en un punto absoluto (o un punto en el infinito), es espacio euclidiano extendido resultante que se denota como ![]() . Todos los puntos absolutos de
. Todos los puntos absolutos de ![]() se encuentran en un hiperplano absoluto, junto con todos los palos k paralelos a él, se encuentra con el hiperplano absoluto en un plano absoluto (k-1). La geometría del hiperplano absoluto
se encuentran en un hiperplano absoluto, junto con todos los palos k paralelos a él, se encuentra con el hiperplano absoluto en un plano absoluto (k-1). La geometría del hiperplano absoluto ![]() es elíptica.
es elíptica.
Del mismo modo, el n-espacio ordinario hiperbólico ![]() (
(![]() ) puede extenderse colindando con los puntos ordinarios de cualquier par absoluto de puntos, es decir, dos puntos en el infinito, uno en cada dirección, el espacio hiperbólico extendido resultante que se denota
) puede extenderse colindando con los puntos ordinarios de cualquier par absoluto de puntos, es decir, dos puntos en el infinito, uno en cada dirección, el espacio hiperbólico extendido resultante que se denota ![]() . Todo los puntos absolutos de
. Todo los puntos absolutos de ![]() se encuentran en una hiperesfera absoluta y cada k-plano ordinario se encuentra con el absoluto hiperesfera único (k-1). Por lo tanto, cada plano ordinario está limitado por un círculo absoluto[22]. El caso de dos dimensiones, el espacio hiperesférico absoluto o ideal con un hiperplano ideal, absoluto u ordinario.
se encuentran en una hiperesfera absoluta y cada k-plano ordinario se encuentra con el absoluto hiperesfera único (k-1). Por lo tanto, cada plano ordinario está limitado por un círculo absoluto[22]. El caso de dos dimensiones, el espacio hiperesférico absoluto o ideal con un hiperplano ideal, absoluto u ordinario.
 17.56.12.png)
1.10.6.2 Isometrías
Ante el surgimiento de nuevas geometrías, Klein da respuesta a esta pregunta introduciendo en la Geometría un nuevo concepto de carácter algebraico: el concepto de grupo. Según el Programa Erlanger de Klein de 1872, una geometría se caracteriza por el grupo de transformación que conserva sus propiedades esenciales. Cada uno de los espacios métricos debe tener en cuenta aquí un grupo isométrico o movimientos rígidos. Por ejemplo, en la geometría euclidiana, es el estudio de los invariantes mediante el grupo de los movimientos rígidos (como las simetrías, giros y traslaciones), transformaciones que preservan las distancias. Un espacio euclidiano tiene el más grande grupo de similitudes, preservando las proporciones de distancias.
Isometría de grupo. Una isometría de Euclides n-espacio ![]() tomando los puntos X e Y respectivamente a los puntos X’ y Y’ mantiene la distancia entre ellos igual:
tomando los puntos X e Y respectivamente a los puntos X’ y Y’ mantiene la distancia entre ellos igual: ![]() . Una similitud de escala
. Una similitud de escala ![]() tiene
tiene ![]() para varios pares de puntos. El grupo de isometría de
para varios pares de puntos. El grupo de isometría de ![]() es llamado grupo Euclidiano
es llamado grupo Euclidiano ![]() . Una traslación en
. Una traslación en ![]() es una isometría de preservación de dirección, con cada punto moviéndose en la misma distancia, por lo que
es una isometría de preservación de dirección, con cada punto moviéndose en la misma distancia, por lo que ![]() es lo mismo para todos los puntos X. Los espacios euclidianos, hiperbólicos y esféricos son orientables, con dos sentidos distinguibles, al igual que los espacios elípticos de dimensiones impares. Una isometría es un espacio orientado directo si considera el sentido o caso contrario la inversión del sentido.
es lo mismo para todos los puntos X. Los espacios euclidianos, hiperbólicos y esféricos son orientables, con dos sentidos distinguibles, al igual que los espacios elípticos de dimensiones impares. Una isometría es un espacio orientado directo si considera el sentido o caso contrario la inversión del sentido.
Los espacios se pueden derivar introduciendo una métrica apropiada en geometría proyectiva, afín o inversa. La geometría afín es una geometría Euclidiana sin perpendicularidad y la geometría proyectiva es una geometría afín sin paralelismo. Ambas son geometrías lineales: dos puntos se encuentran como máximo en un punto. El plano proyectivo real se basa en algunos axiomas elementales, pero para las dimensiones más altas hacemos uso de coordinadas. De hecho seleccionando una polaridad absoluta convierte el n-espacio proyectivo o afín en un n-espacio métrico lineal: elíptico, hiperbólico o euclidiano. El álgebra vectorial ordinaria se usa la multiplicación por matrices para representar transformaciones lineales y la suma de vectores para representar traslaciones.
Referencias
[1] Hill, Victor. (2002). President Garfield and the Pythagorean Theorem. Math Horizons. 9. 9-15. 10.1080/10724117.2002.11975143.
[2] Rassias, M. Th. (2011). Problem-solving and selected topics in number theory. In The spirit of the mathematical olympiads. New York: Springer. (Foreword by Preda Mihailescu.)
[3] Wiles, A. (1995). Modular elliptic curves and Fermat’s last theorem. Annals of Mathematics, 141(3), 443–551.
[4] Penrose, Roger. (2004). The Road to Reality : A Complete Guide to the Laws of the Universe / R. Penrose..
[5] Landriani, Giannantonio. (2020). Eugenio Beltrami and the science of construction.
[6] Kahle, Reinhard. (2013). David Hilbert and Principia Mathematica 10.1057/9781137344632_2.
[7] Pons, Viviane & Châtel, Grégory. (2013). Counting smaller elements in the Tamari and m-Tamari lattices. Journal of Combinatorial Theory, Series A. 134. 10.1016/j.jcta.2015.03.004.
[8] Sedrakyan, N. (2010). Problem O174. Mathematical Reflections, 5, 4.
[9] Pender, Anne. (2005). 'Phrases between us': The poetry of Anna Wickham. Australian Literary Studies. 22. 229-244. 10.20314/als.f6b66f19be.
[10] Irving, Andrew. (2020). The art of turning left and right. 10.4324/9781003084570-3.
[11] Guan, Dong & Wu, Jiu & Jing, Li & Gao, Nansha & Hou, Mingming. (2015). Application of a Helmholtz structure for low frequency noise reduction. Noise Control Engineering Journal. 63. 10.3397/1/376303
[12] https://es.wikipedia.org/wiki/Inversión_(geometr%C3%ADa)
[13] Goossens, Sander & Sabaka, T.J. & Wieczorek, Mark & Neumann, G.A. & Mazarico, E. & Lemoine, François & Nicholas, J.B. & Smith, D.E. & Zuber, M.T.. (2019). High-resolution gravity field models from GRAIL data and implications for models of the density structure of the Moon's crust. Journal of Geophysical Research: Planets. 10.1029/2019JE006086.
[14] Teresa Lucca, Ana M. (2013). Blog de matemáticas y TIC’S. Recuperado de https://matematics.wordpress.com/2013/12/09/rafael-bombelli/
[15] Penrose Roger (2007). El camino a la realidad. Barcelona: DEBATE.
[16] Conway, J. H. & Guy, R. K. (1996). Euler's Wonderful Relation. The Book of Numbers. New York: Springer-Verlag
[17] https://es.wikipedia.org/wiki/Geometr%C3%ADa_proyectiva
[18] No. 44 (Math. Assoc. of America, Washington, DC, 2009).
[19] Moreno-Armella, Luis. (1998). The parallel postulate. Revista de la Academia Colombiana de Ciencias Exactas, Físicas y Naturales. 22.
[20] Weeks, Jeffrey. (2020). The Hyperbolic Plane. 10.1201/9781315162553-10.
[21] Beltagy, M.A. & Swealam, M.. (1985). Isometric immersion into a hyperbolic space. Kyungpook Mathematical Journal. 25.
[22] Spotnitz, Hyman. (2020). The Couch and the Circle / H. Spotnitz..
_______________________________________________-
Autores:
Eduardo Ochoa Hernández
Nicolás Zamudio Hernández
Lizbeth Guadalupe Villalon Magallan
Mónica Rico Reyes
Pedro Gallegos Facio
Gerardo Sánchez Fernández
Rogelio Ochoa Barragán